| 3-1. Biomechanika - zakres badań i zastosowań, biomechaniczne modele układu mięśniowo-szkieletowego |
| Krzysztof Kędzior |
| 3-1.1. Wstęp, definicja i podział biomechaniki, zakres badań i zastosowań |
- Biomechanika ogólna, która zajmuje się wyznaczaniem sił zewnętrznych i sił wewnętrznych działających na układ biologiczny (np. na ciało człowieka) oraz skutków, jakie te siły wywołują (np. ruch segmentów ciała, ruch płynów biologicznych w organizmie, rozkład obciążeń w układzie mięśniowo-szkieletowym i zmiany w tkankach poddanych działaniu sił). Typowymi zadaniami biomechaniki ogólnej są np.: wyznaczanie sił rozwijanych przez poszczególne mięśnie w trakcie wykonywania danego ruchu ciała (tzw. zagadnienie współdziałania mięśni), badanie własności materiałów biologicznych (mięśni, ścięgien, kości, chrząstek i innych) lub wyznaczanie przebiegu procesu adaptacji funkcjonalnej tkanek kości poddanej obciążeniu (tzw. remodeling). Zadania te często dotyczą sterowania procesami w organizmie (np. sterowania ruchem ciała, sterowania wzrostem tkanek) i są wtedy wspólne dla biomechaniki i biocybernetyki.
- Biomechanika medyczna, polegająca na stosowaniu wyników badań biomechaniki ogólnej w profilaktyce, diagnostyce, leczeniu i rehabilitacji narządów (głównie narządu ruchu) człowieka. Typowymi zadaniami biomechaniki medycznej są np.: analiza chodu (norma i patologia) w celu leczenia i rehabilitacji osób niepełnosprawnych ruchowo, analiza przepływu krwi przez naturalne zastawki serca w celu prawidłowego zaprojektowania zastawek sztucznych lub analiza obciążeń działających na układ kość-implant w celu dobrania odpowiedniego dla danego pacjenta implantu (np. sztucznego stawu) i zaprojektowania zabiegu jego wszczepienia. Wiele zagadnień biomechaniki medycznej łączy ją z bioinżynierią, a szczególnie z inżynierią ortopedyczną (projektowanie implantów, protez i aparatów ortopedycznych).
- Biomechanika sportu, której celem jest wykorzystanie zasad biomechaniki ogólnej do doskonalenia techniki ruchu w sporcie (np. skoku wzwyż, w dal, skoku narciarskiego, rzutów, ćwiczeń akrobatycznych), zwiększenie efektywności treningu sportowego oraz projektowanie bezpiecznych i skutecznych przyborów sportowych (np. butów narciarskich, oszczepów, rakiet tenisowych).
- Biomechanika inżynierska, w której stosuje się zasady biomechaniki ogólnej do analizy i projektowania urządzeń technicznych, np. manipulatorów medycznych, robotów, maszyn kroczących oraz mikrorobotów. W zakresie wykorzystania w technice zasad budowy i działania organizmów żywych biomechanika inżynierska ma obszar wspólny z bioniką.
- Biomechanika pracy (3-1. slajd 3),
której przedmiotem jest rozpatrywanie przyczyn i skutków obciążeń wynikających
z pracy fizycznej dla układu mięśniowo-szkieletowego człowieka. Biomechanika
pracy odgrywa istotną rolę przy projektowaniu procesów i stanowisk pracy
bezpiecznych dla zdrowia człowieka. Uwzględnia się tu natychmiastowe
(np. uderzenie) i skumulowane w czasie (np. działanie drgań) skutki
działania sił występujących w procesie pracy. W tym dziale umieścić
można także biomechanikę zderzeń. Przedmiotem badań jest w tym wypadku
ocena skutków i projektowanie sposobów zapobiegania obrażeniom ciała
człowieka w trakcie uderzeń powstałych zarówno w procesie pracy (np.
upadek z wysokości), jak i podczas wypadków drogowych. Biomechanika
pracy, wraz z fizjologią i psychologią, tworzy fundament współczesnej
ergonomii.
(3-1. slajd 3)
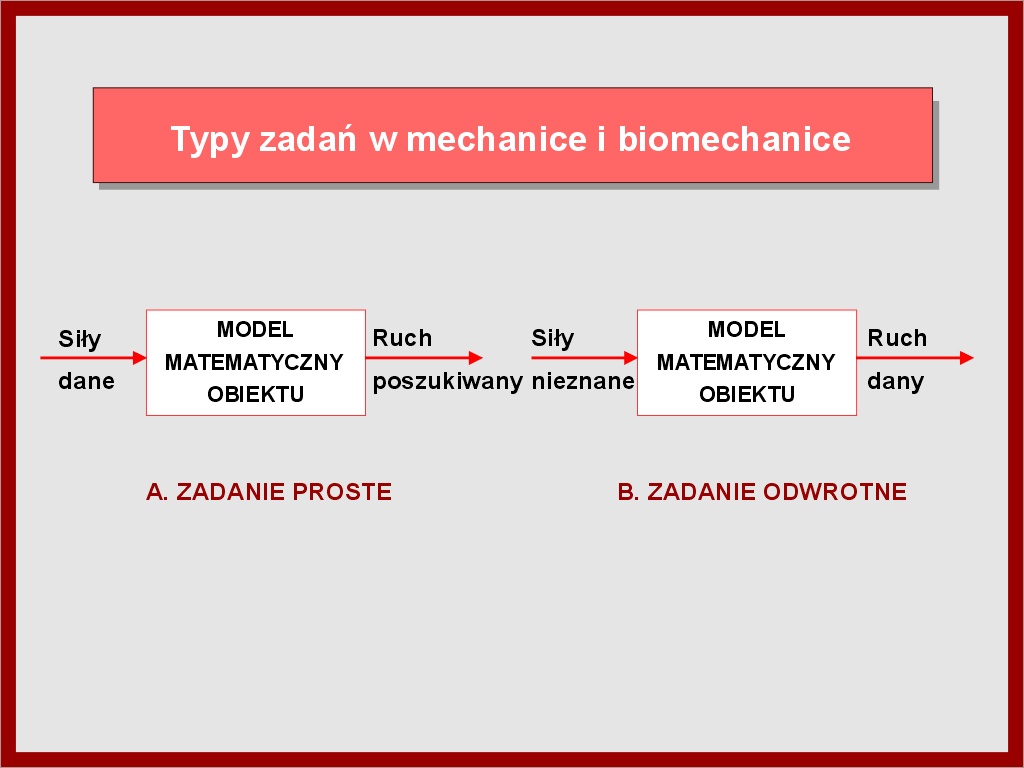
- znając przebiegi
w czasie sił rozwijanych przez mięśnie i sił zewnętrznych oraz masy
i momenty bezwładności członów, można wyznaczyć przebiegi w czasie (trajektorie)
przemieszczeń dowolnej liczby wybranych punktów ciała człowieka (tzw.
zadanie proste, 3-1. slajd 11A)
3-1. slajd 11A
- znając z badań
doświadczalnych trajektorie wybranych punktów układu (dany ruch) oraz
masy i momenty bezwładności członów, a także siły zewnętrzne wynikające
z procesu pracy, można - rozwiązując równania ruchu - wyznaczyć przebiegi
w czasie sił mięśniowych, które ten ruch wywołały, oraz sił reakcji
w stawach (tzw. zadanie odwrotne, 3-1. slajd 11B).
3-1. slajd 11B
- łatwość modelowania przestrzennej budowy zarówno całego układu mięśniowo-szkieletowego człowieka, jak i jego elementów (kości, kręgów, żeber, krążków międzykręgowych, mięśni, ścięgien),
- możliwość badania statyki, dynamiki i stabilności układu mięśniowo-szkieletowego w różnych sytuacjach życiowych (norma, patologia, praca, sport),
- możliwość stosowania w modelu różnych kryteriów optymalizacyjnych, modelujących prawa stosowane przez centralny układ nerwowy przy sterowaniu pracą mięśni (ważne przy rozwiązywaniu zadania współdziałania mięśni),
- łatwość wprowadzania zmian parametrów geometrycznych i materiałowych modelu.
- własności mechaniczne kości, więzadeł i mięśni są anizotropowe, a główne kierunki sztywności (np. kierunek włókien mięśniowych) zmieniają swoją orientację w przestrzeni,
- parametry sztywnościowe kości, takie jak moduły Younga (10000 ÷ 15000 MN/m2), są znacznie większe od odpowiednich parametrów dysków, mięśni i więzadeł (0,4 ÷ 160 MN/m2), co powoduje, że końcowy układ równań, opisujący układ kostno-mięśniowy, jest źle uwarunkowany (w równaniach występują zarówno wartości bardzo duże, jak i bardzo małe, co utrudnia rozwiązanie numeryczne),
- napięcie w mięśniach jest wywołane nie tylko przez zmianę odległości między przyczepami (tzw. składowa bierna napięcia), lecz głównie przez skurcz w kierunku włókien mięśniowych, powodowany pobudzeniem generowanym przez układ nerwowy (składowa czynna),
- jądra miażdżyste dysków międzykręgowych oraz - w przybliżeniu - jama brzuszna są obszarami prawie nieściśliwymi,
- stawy (kończyn, międzykręgowe, klatki piersiowej) stanowią istotne ograniczenia ruchów względnych kości długich, kręgów i żeber,
- występujące w układzie ciśnienia w jądrach miażdżystych dysków międzykręgowych, w jamie brzusznej oraz w klatce piersiowej mają charakter niezachowawczy (kierunki sił zależą od odkształceń).
- ADAMS (Android Simulation Software). Mechanical Dynamics Inc., Ann Arbor, Michigan.
- Biomechanics of Musculo-Skeletal System. Red. B.M. Nigg, W. Herzog. Chichester, John Wiley and Sons, Inc. 1994.
- Biomechanika. Red. A. Morecki, W. Ramotowski. W: Problemy Biocybernetyki i Inżynierii Biomedycznej. T. 5. Warszawa, Wyd. Komunikacji i Łączności 1990.
- Borowski S. i in.: Metoda wyznaczania obciążeń układu ruchu człowieka współdziałającego z maszyną. Prace CIOP 1992, R.42, z.153/154, s. 89-101.
- Chaffin D.B., Andersson G.B.J.: Computerized biomechanical models for high exertion manual jobs. Proc. of the 3rd Pan-Pacific Conference on Occupational Ergonomics, Seoul 1994, 1-15.
- Chaffin D.B., Andersson G.B.J.: Occupational Biomechanics. Wyd. 2. New York, John Wiley and Sons, Inc. 1991.
- Dietrich M., Kędzior K., Rzymkowski C.: Metody komputerowe w biomechanice. Studia i Monografie AWF we Wrocławiu 1994, z.40, s. 139-147.
- Dietrich M., Kędzior K., Zagrajek T.: A biomechanical model of the human spinal system. Proc. Instn. Mech. Eng., vol. 205. Journal of Engineering in Medicine 1991, s. 19-26.
- Dietrich M., Kędzior K., Zagrajek T.: Prediction of internal forces in the human musculoskeletal system. Biomechanics Seminar, Chalmers University of Technology, Göteborg 1997, vol.10, s. 96-105.
- Dietrich M., Kędzior K., Zagrajek T.: Three-dimensional FEM model of man-operator under vibration. Proc. of Ninth World Congress on the Theory of Machines and Mechanisms, Milano 1995, Politecnico, vol.3, s. 2187-2190.
- Dietrich M. I in.: Non-linear finite element analysis of formation and treatment of intervertebral disc herniae. Proc. Instn. Mech. Engs, vol.206. Journal of Engineering in Medicine 1992, 225-231.
- Jóźwiak Z. i in.: Ocena obciążenia narządu ruchu w trakcie pracy zawodowej z uwzględnieniem pozycji ciała i podnoszenia ciężarów. Poradnik metodyczny. Łódź, IMP 1992.
- Kamińska J., Tokarski T.: Metoda ErgoMES i jej praktyczne wykorzystanie dla oceny obciążenia narządu ruchu. W: Modelowanie i symulacja komputerowa w ergonomii - materiał szkoleniowy. Warszawa, CIOP 1998, s. 51-65.
- Kamińska J. i in.: Ergonomiczna metoda oceny obciążenia układu ruchu - ErgoMES. Biology of Sport 1998, vol.15, supl. 8, s. 318-322.
- Kędzior K., Roman-Liu D.: Wybrane zagadnienia biomechaniki pracy. W: Bezpieczeństwo pracy i ergonomia. Red. nauk. D. Koradecka. Warszawa, CIOP 1999, s. 119-147.
- Kędzior K., Zagrajek T.: A biomechanical model of the human musculoskeletal system. W: Human and Walking Machine Locomotion, Red. A. Morecki, K.J. Waldron. Wiedeń, Springer 1997, s. 124-153.
- Komi P.V. i in.: Optical fibre as a transducer for direct in-vivo measurement of human tendomuscular forces. Proc. XV Congr. of the Int. Society of Biomechanics. University of Jyväskylä 1995, s. 494-495.
- MADYMO 3D. Netherlands Organization of Applied Scientific Research Crash Safety Center. Delft 1994.
- Matyjewski M., Nawalany T., Maklewska E.: Analiza dynamiczna wypadku motocyklowego z uderzeniem barkiem uwzględniająca podatność odzieży ochronnej. Biology of Sport 1998, vol.15, supl.8, s. 261-265.
- Morecki A., Kędzior K.: Biomechanika. Wielka Encyklopedia PWN [w druku].
- Nachemson A.L., Elfrstrom G.: Intradiscal dynamic pressure measurements in lumbar discs. Scand. J. Rehabil. Med. 1970, supl. 1, s. 1-10.
- Nilsson G.: On Development of Tools for Ergonomic Simulation and Evaluation in a Computerized Environment. Göteborg, Chalmers University of Technology1994.
- PAM-SAFE™, PAM-SYSTEM INTERNATIONAL, Paris 1997.
- Seireg A., Arvikar R.: Biomechanical Analysis of the Musculoskeletal Structure for Medicine and Sport. New York, Hemisphere Publ. Co. 1989.
- 3D Static Strength Prediction Program ™, User's Manual, Version 2.0. The University of Michigan, Center for Ergonomics 1993.
- Wismans J.S.H.M.: Injury Biomechanics. Wyd. 2. Einhoven University of Technology 1997.
Biomechanika, czyli mechanika układów żywych, jest interdyscyplinarną nauką o przyczynach i skutkach działania sił zewnętrznych i wewnętrznych na układy biologiczne, np. na człowieka, zwierzę, owada, roślinę [2,3,20], (3-1. slajd 1).
(3-1. slajd 1)

(3-1. slajd 2)
Współczesną biomechanikę zapoczątkowały w drugiej połowie XIX w. badania ruchu człowieka, które podjęto dzięki wynalazkowi fotografii, a następnie kinematografii. Od tamtych lat biomechanika rozwijała się szybko dzięki wykorzystaniu coraz doskonalszych metod doświadczalnych i teoretycznych. Badania biomechaniczne przyczyniły się do lepszego poznania fizjologii w normie i patologii, rozwoju profilaktyki, diagnostyki, terapii i rehabilitacji medycznej oraz protetyki, osiągania lepszych wyników w sporcie, poprawy bezpieczeństwa pracy i komunikacji. Obecnie obszar badań i zastosowań wyników biomechaniki gwałtownie rozszerza się. Świadczy o tym rosnąca liczba ośrodków i publikacji związanych z tą dziedziną. Współczesny poziom nauk ścisłych i technicznych umożliwia bowiem coraz szersze badanie tak złożonych układów, jak organizmy żywe. Korzysta z tego biomechanika.
Spośród wymienionych działów współczesnej biomechaniki szczególnie intensywnie rozwija się w ostatnich latach biomechanika pracy fizycznej. Powodem tego jest wzrost świadomości - zarówno wśród pracodawców, jak i pracobiorców - zagrożeń, jakie stanowi dla zdrowia i życia człowieka wykonywanie nawet lekkiej pracy fizycznej, ale w nieodpowiedni sposób i w nieodpowiednich warunkach. Jest to najczęściej spowodowane pominięciem przy projektowaniu procesu i stanowiska pracy wyników analizy obciążeń ciała wywołanych czynnościami roboczymi i porównania ich z możliwościami pracownika, które określa się na podstawie charakterystyk biomechanicznych układu mięśniowo-szkieletowego.
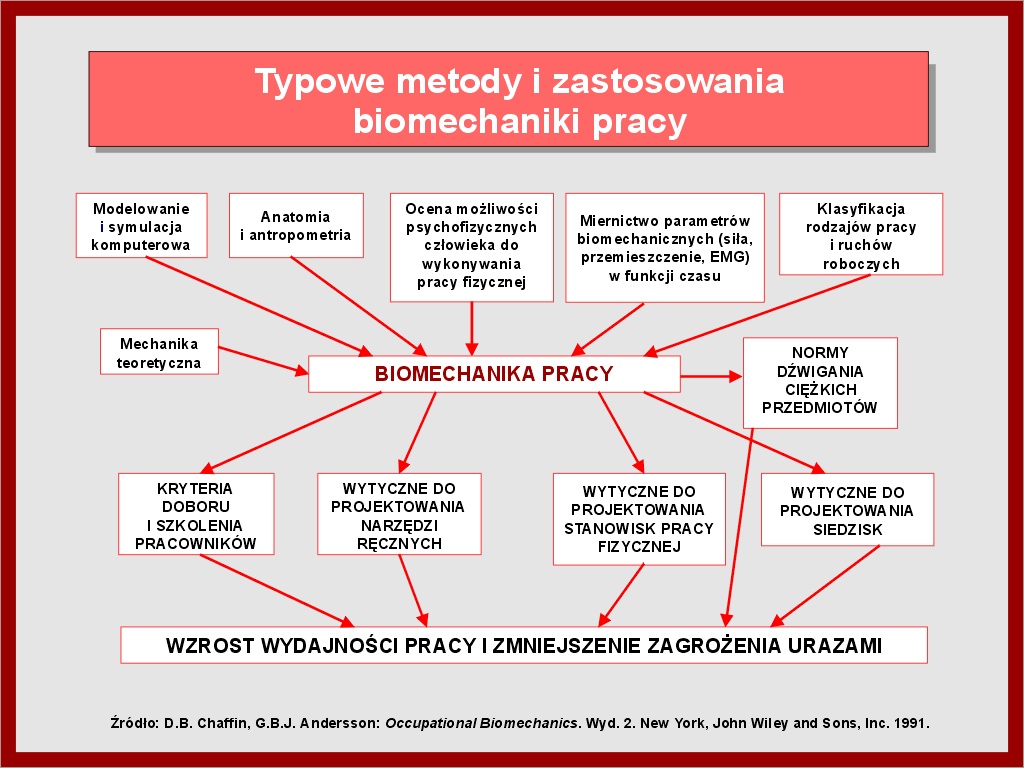
Typowe metody biomechaniki pracy fizycznej obejmują: badanie struktury i funkcji układu mięśniowo-szkieletowego, traktowanego jako aparat pracy (w tym także wybrane problemy z zakresu anatomii i antropometrii), miernictwo parametrów biomechanicznych (sił i momentów sił działających na ciało człowieka, przemieszczeń, prędkości i przyspieszeń segmentów ciała podczas pracy) i elektrycznych (elektromiografia), modelowanie matematyczne i symulację komputerową procesu pracy, sposoby oceny wydolności organizmu człowieka przy wykonywaniu typowych prac (np. przenoszeniu ciężarów, pracy operatora sprzętu mechanicznego lub komputera), klasyfikację rodzajów pracy fizycznej i ruchów roboczych [6]. Rezultatem badań są wyniki, których zastosowanie do projektowania procesów i stanowisk pracy skutkuje wzrostem wydajności przy jednoczesnym zmniejszeniu zagrożeń urazami (3-1. slajd 4)
(3-1. slajd 4)
| 3-1.2. Siły działające na człowieka w procesie pracy |
Dane statystyczne dotyczące absencji chorobowej w zakładach pracy wskazują, że w krajach uprzemysłowionych choroby narządu ruchu są drugą, po chorobach układu krążenia, przyczyną zwolnień lekarskich pracowników fizycznych. Choroby te są skutkiem sił działających na układ mięśniowo-szkieletowy człowieka w procesie pracy. Rodzaje urazów powodowanych działaniem tych sił przedstawiono w tabeli 1 (3-1. slajd 5), [6].
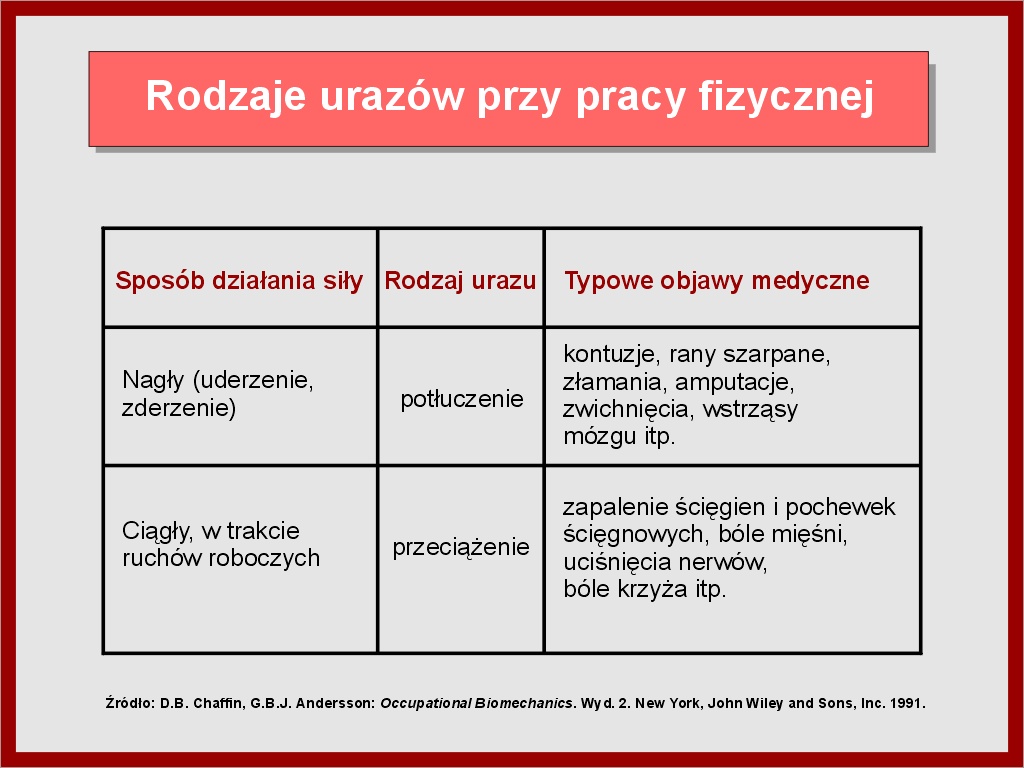
(3-1. slajd 5)
Siły działające w sposób nagły są na ogół siłami zewnętrznymi względem ciała człowieka i występują przeważnie podczas zdarzeń o charakterze wypadku przy pracy.
Siły o ciągłym charakterze działania występują w trakcie typowego procesu pracy. Mogą one należeć do zewnętrznych (np. ciężar trzymany w rękach, siła oddziaływania dźwigni na rękę, siła między stopą a podłożem) lub wewnętrznych (np. siły rozwijane przez mięśnie i poprzez ścięgna przykładane do kości, siły reakcji - czyli oddziaływanie kości na kość - w stawach, siły ściskające dyski międzykręgowe) względem ciała człowieka. Ich skutki dla zdrowia pracownika uwidaczniają się niekiedy dopiero po wielu latach pracy.
Choroby narządu ruchu powstają także u pracowników, którzy nie wykonują pracy fizycznej. Można podać tu dwa skrajne przykłady. Operatorzy komputerów, spędzający dzień roboczy przy klawiaturze, nie podlegają dużym obciążeniom zewnętrznym. Natomiast długotrwale utrzymywana, wymuszona pozycja ciała, głównie rąk i tułowia, powoduje u nich niewielkie, ale o ciągłym charakterze działania, siły wewnętrzne, wywołujące z czasem typowe objawy chorobowe. Z drugiej strony, piloci samolotów myśliwskich poddawani są okazjonalnie dużym, krótkotrwałym przeciążeniom, wywołującym bardzo duże siły wewnętrzne o kumulujących się w czasie, poważnych dla organizmu, skutkach.
Przy okazji tego ostatniego przykładu należy wspomnieć o dodatkowej, nie wymienionej jeszcze, kategorii sił, tj. o siłach bezwładności, które są wynikiem przyspieszeń działających na ciało człowieka i na podnoszone lub przenoszone przez niego obiekty. Siły te w mechanice teoretycznej nie są zaliczane do tzw. sił rzeczywistych, ale ich skutki dla organizmu są takie same, jak sił rzeczywistych zewnętrznych. Typowe okoliczności występowania sił bezwładności w procesie pracy to np. drgania siedziska lub narzędzia (wibratora) trzymanego w rękach, gwałtowne hamowanie pojazdu (np. przy zderzeniu) lub wymienione już akrobacje lotnicze.
Na ogół mamy wyobrażenie o wartościach sił zewnętrznych działających na ciało człowieka lub potrafimy je oszacować. W mniejszym stopniu zdajemy sobie sprawę, jakie są wartości sił wewnętrznych działających na elementy układu ruchu człowieka. Rozpatrzmy dwa przykłady.
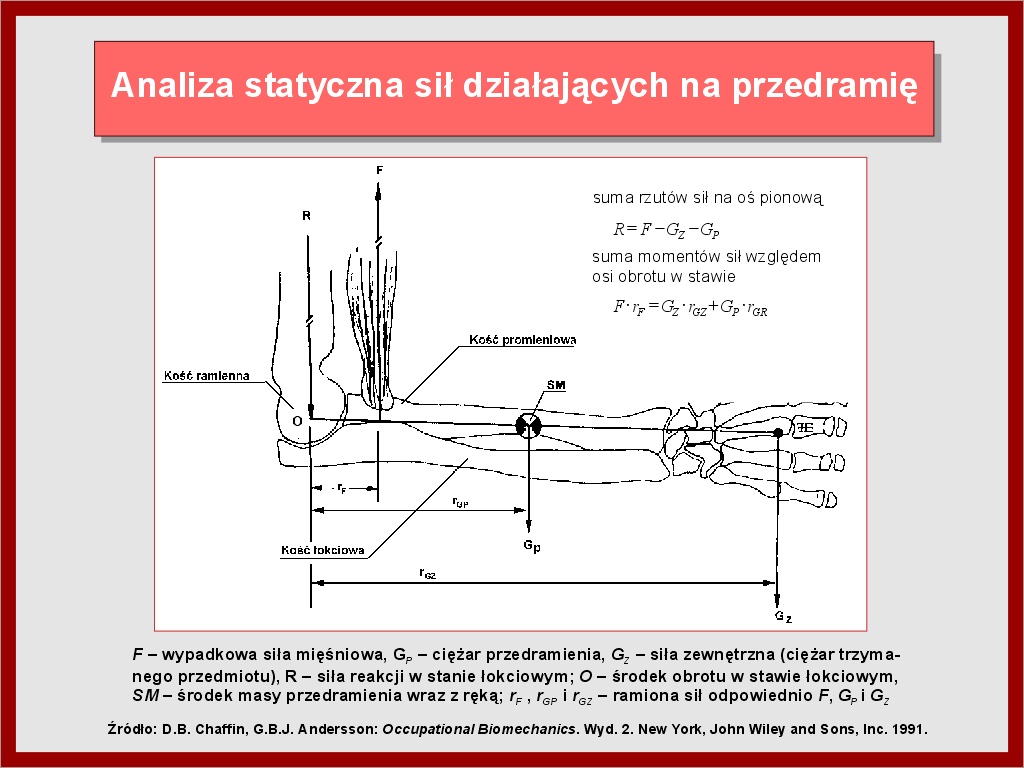
Na foliogramie 3-1. slajd 6 przedstawiono analizę statyczną sił działających na kości przedramienia człowieka w trakcie trzymania w ręce poziomo, przy kącie prostym przedramienia względem ramienia, ciężaru Gz. Kości przedramienia tworzą dźwignię jednostronną o osi obrotu O w stawie łokciowym, a układ sił działających na tę dźwignię jest bardzo łatwy do analizy, bo wszystkie siły są równoległe. Równania statycznej równowagi sił są następujące:
- suma rzutów sił na oś pionową
R = F - GZ - GP (1)
- suma momentów sił względem osi obrotu w stawie
F · rF = GZ · rGZ + GP · rGP (2)
gdzie:
-
F - wypadkowa siła mięśniowa
GP - ciężar przedramienia
GZ - siła zewnętrzna (ciężar trzymanego przedmiotu)
R - siła reakcji w stanie łokciowym
O - środek obrotu w stawie łokciowym
SM - środek masy przedramienia wraz z ręką; rF, rGP i rGZ - ramiona sił odpowiednio F, Gp i Gz.
3-1. slajd 6
Siłami wewnętrznymi w analizowanym układzie są: wypadkowa siła mięśniowa F oraz siła reakcji w stawie R. Ponieważ promień rGZ jest dużo większy od rF, z równania (2) wynika, że siła mięśniowa, głównie rozwijana przez mięsień dwugłowy ramienia, jest kilku- lub kilkunastokrotnie większa od ciężaru trzymanego w ręce. Przy dużych wartościach GZ, rzędu 100 N, siła reakcji w stawie R jest także kilku- lub kilkunastokrotnie większa od GZ, co z kolei wynika z równania (1).
Sytuacja przedstawiona na foliogramie 3-1. slajd 6 jest typowa dla układu mięśniowo-szkieletowego człowieka. Najczęściej mięśnie pracują w niekorzystnych warunkach mechanicznych, napędzając dźwignie (kości) aparatu ruchu człowieka przy przełożeniach w stosunku około 10:1. Tracąc na sile, wywołują duże prędkości w stawach, a więc także duże prędkości końcówek kończyn, co umożliwia na przykład szybki bieg, szybki ruch ręką itp. Przy wykonywaniu pracy fizycznej jest to zjawisko niekorzystne. Pomimo to, przeciętny człowiek może przez kilka sekund utrzymać w dwóch rękach, przy poziomej pozycji przedramion, przedmiot o ciężarze 900 N. Siła rozwijana przez mięśnie musi wynosić w tym położeniu około 9000 N, a podnoszona masa jest około 2000 razy większa od masy pracujących mięśni. Wywołuje to jednak duże naprężenia w tkankach, których skutki mogą kumulować się w czasie.
3-1. slajd 6
Zjawisko kumulowania się skutków działania sił wewnętrznych dobrze ilustruje przykład przedstawiony na foliogramie 3-1. slajd 7, dotyczący analizy obciążeń działających na krążek międzykręgowy (dysk) L5/S1 przy podnoszeniu ciężaru trzymanego w rękach. Rozpatrując równowagę sił działających na górną (ponad dyskiem L5/S1) część ciała względem osi obrotu ulokowanej w rejonie tego dysku, łatwo wykazać, że przy podnoszonym ciężarze 130 N siła ściskająca dysk wynosi, zależnie od pozycji ciała, od 1800 do 2700 N, a siła ścinająca dysk (poprzeczna do osi dysku) - od 340 do 500 N. Duża wartość siły ściskającej dysk wynika z tego, że mięśnie prostowniki grzbietu działają na bardzo małym ramieniu względem osi obrotu w punkcie O. Przy analizie uwzględniono tu działanie sił bezwładności. Podnoszenie ciężaru nie odbywa się bowiem, szczególnie w początkowej fazie (poderwanie), ruchem jednostajnym. Łatwo wykazać, że przy pozycjach ciała i podnoszonych ciężarach praktycznie występujących podczas wykonywania pracy fizycznej, siły działające na dysk międzykręgowy mogą być dużo większe (np. siła ściskająca dysk L5/S1 nawet rzędu 7000 N). Siły tego rzędu powodują duże naprężenia w tkance, których skutkiem są kumulujące się mikrourazy i - ostatecznie - trwałe uszkodzenie dysków międzykręgowych odcinka lędźwiowego.
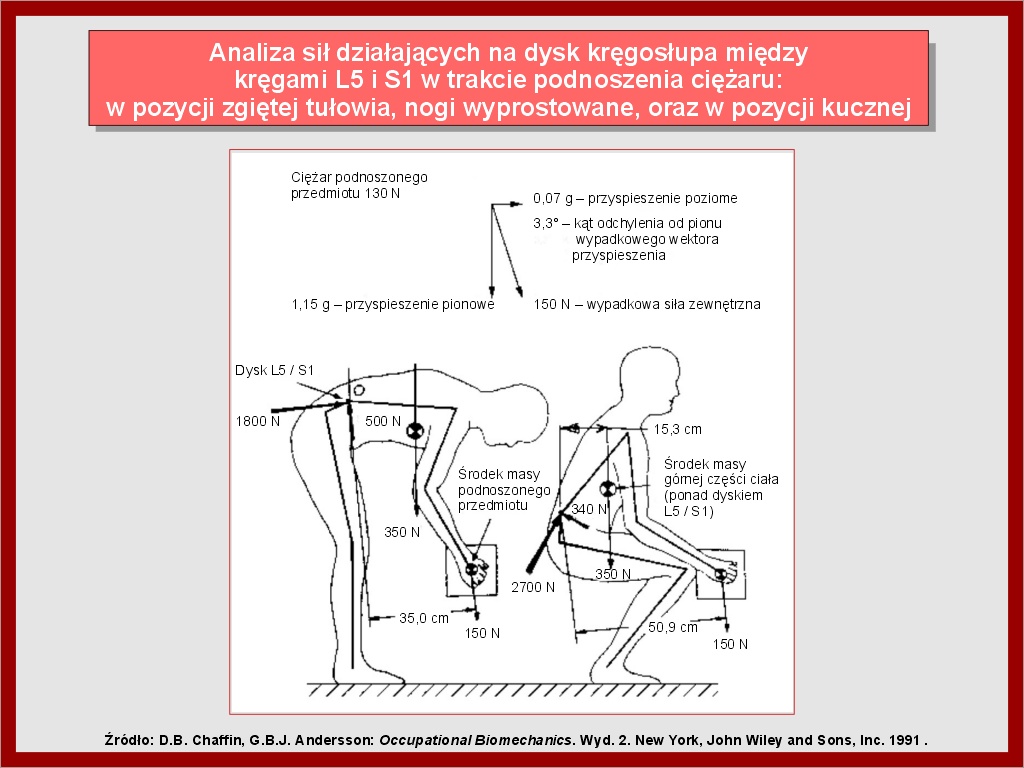
3-1. slajd 7
Z podanych przykładów wynika potrzeba wyznaczania nie tylko sił zewnętrznych, lecz także sił wewnętrznych w układzie ruchu człowieka, w celu oceny skutków, jakie dla organizmu ma dany rodzaj wykonywanej pracy. Stosuje się do tego metody doświadczalne i teoretyczne (3-1. slajd 8).
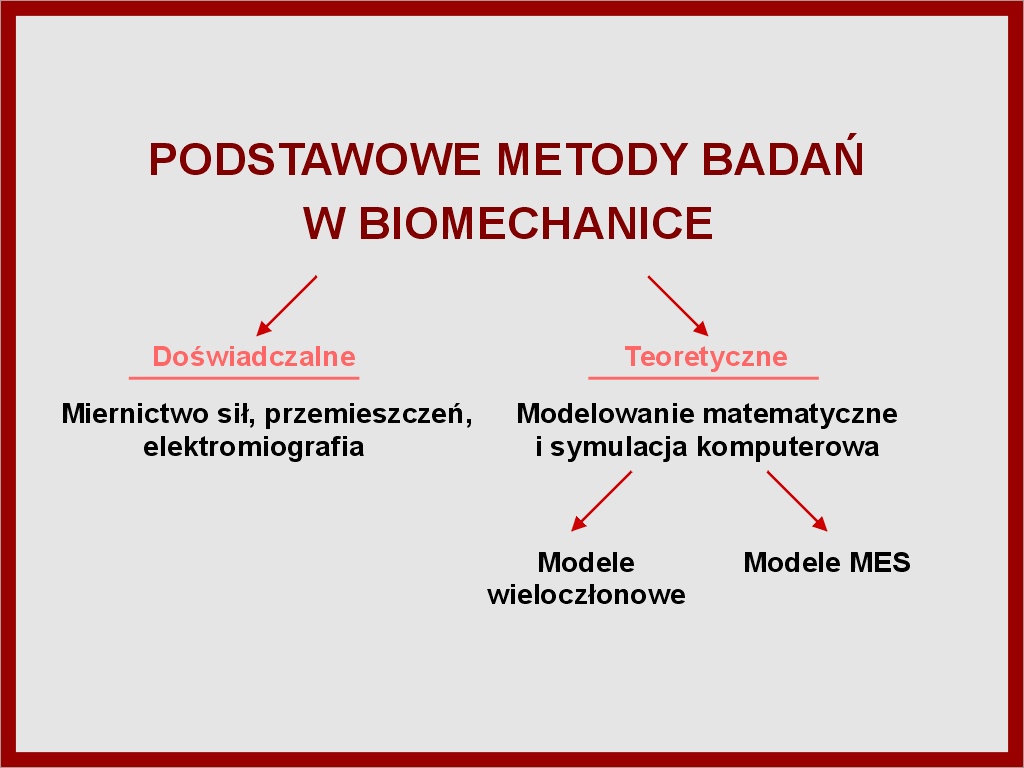
(3-1. slajd 8)
| 3-1.3. Metody doświadczalne |
Metody doświadczalne, polegające na bezpośrednim pomiarze sił, mają w biomechanice pracy ograniczone zastosowanie. Mierzy się tak głównie siły zewnętrzne działające na elementy ciała człowieka w procesie pracy. Stosuje się do tego celu dynamometry do pomiaru sił działających na kończyny górne lub platformy dynamometryczne do pomiaru sił reakcji między stopami a podłożem.
Bezpośredni pomiar sił wewnętrznych wymaga naruszania powłok ciała człowieka, np. w celu pomiaru ciśnienia w dysku międzykręgowym stosuje się wkłuwany czujnik [21], a do pomiaru siły rozwijanej przez mięsień - czujnik światłowodowy przekłuwany przez ścięgno [17]. Ze względów etycznych i medycznych tego typu pomiary mają bardzo ograniczone zastosowanie.
Metody doświadczalne stosowane są dość często do pomiaru sił zewnętrznych o charakterze udarowym działających na człowieka, np. w samochodzie podczas zderzenia. Ciało człowieka zastępuje się wtedy specjalnymi manekinami, w których umieszcza się czujniki sił i przyspieszeń (do szacowania sił bezwładności). Nie jest to jednak sytuacja typowa dla biomechaniki pracy fizycznej.
Do pośredniego szacowania sił wewnętrznych, rozwijanych przez mięśnie w procesie pracy, stosowana jest często elektromiografia, czyli rejestracja za pomocą elektrod zewnętrznych (naklejonych na skórze) lub wkłuwanych potencjałów elektrycznych, towarzyszących skurczom mięśni szkieletowych. Podstawą tej metody jest założenie, że amplituda odpowiednio przetworzonego elektromiogramu (np. odpowiednio przefiltrowanego) jest proporcjonalna (najczęściej nieliniowo) do wartości siły rozwijanej przez mięsień. Ze względu jednak na trudności z wyznaczeniem współczynnika proporcjonalności, metoda ta służy głównie do określenia, które mięśnie zaangażowane są w procesie pracy na danym stanowisku roboczym. Elektromiogram jest także wykorzystywany do analizy procesu zmęczenia mięśni w czasie pracy.
Duże znaczenie w biomechanice pracy ma doświadczalna rejestracja trajektorii (czyli torów w funkcji czasu), wybranych i zaznaczonych za pomocą tzw. markerów, punktów ciała człowieka podczas badanej czynności roboczej. Najczęściej stosuje się do tego celu rejestrację filmową lub wideo za pomocą jednej kamery (do rejestracji ruchu w jednej płaszczyźnie, np. strzałkowej) lub wielu kamer (do rejestracji ruchu przestrzennego). Zebrane dane służą do wyznaczania sił wewnętrznych (momentów wypadkowych sił mięśniowych i sił reakcji w stawach) przy wykorzystaniu praw mechaniki, co jest przedmiotem następnego rozdziału.
| 3-1.4. Metody teoretyczne |
Metody teoretyczne służą głównie do wyznaczania sił wewnętrznych. Podstawowymi narzędziami są tu modelowanie matematyczne i symulacja komputerowa [7,9].
Symulacja komputerowa
w biomechanice polega na: wspomaganym komputerowo formułowaniu modeli
matematycznych układów biomechanicznych na podstawie sformułowanych wcześniej
modeli fizycznych, rozwiązywaniu układów równań tworzących dany model
matematyczny i prezentacji wyników w postaci czytelnej dla użytkownika.
Typowy schemat postępowania przedstawiono na slajdzie 3-1. slajd 9.
3-1. slajd 9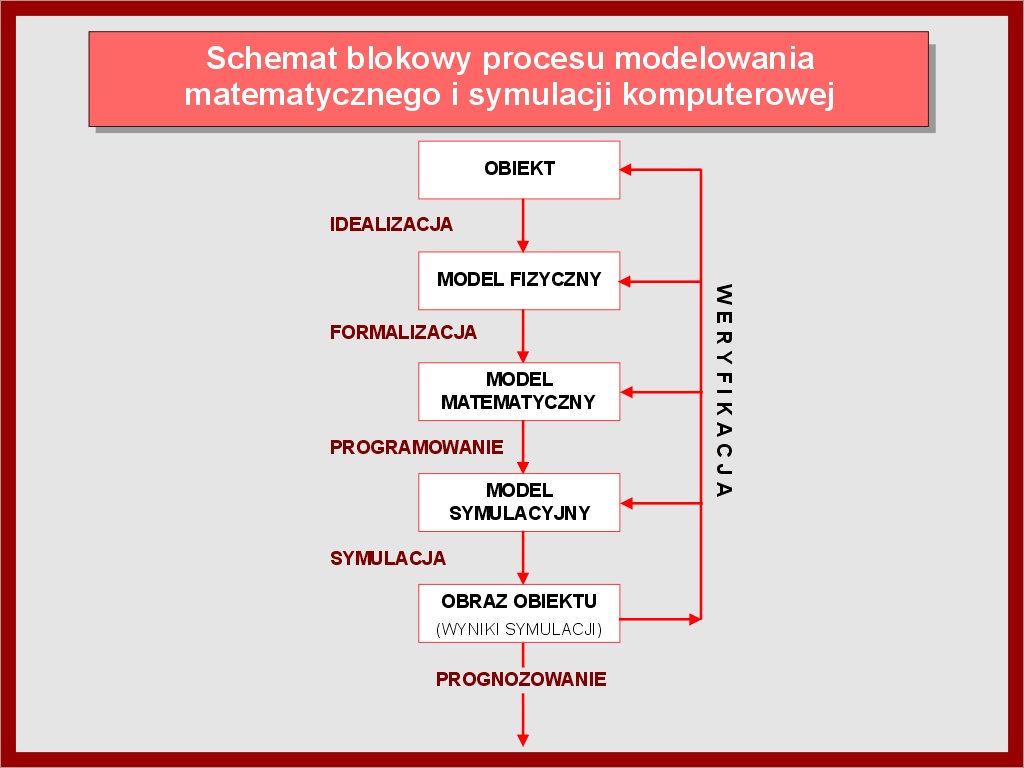
We współczesnym modelowaniu, w biomechanice (w tym także biomechanice pracy) stosuje się dwa typy modeli fizycznych: modele fizyczne o parametrach (np. masa, sztywność, dane materiałowe) skupionych lub modele fizyczne o parametrach rozłożonych. Mogą wystąpić też modele mieszane.
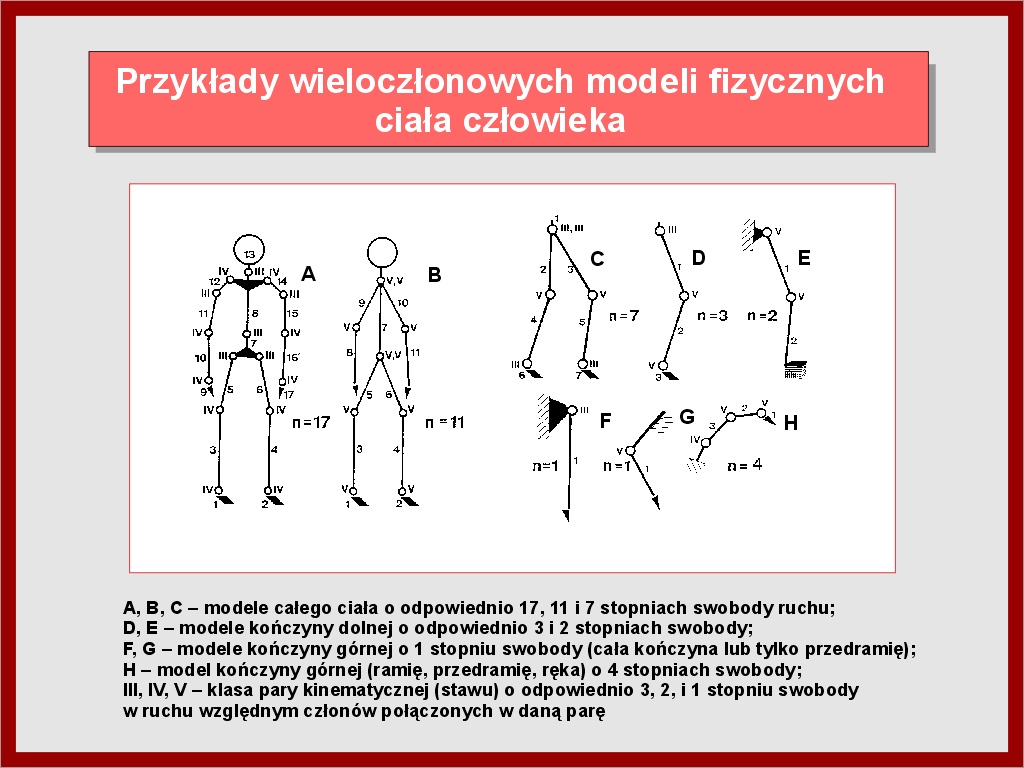
W pierwszym z typów modeli układ ruchu człowieka (lub jego część, np. jedną kończynę) rozpatruje się jako układ wieloczłonowy, czyli biomechanizm zbudowany z członów sztywnych połączonych przegubami (stawy) i napędzanych siłami rozwijanymi przez mięśnie (lub zespoły mięśni).
Na foliogramie 3-1. slajd 10 przedstawiono przykłady takich modeli. W zależności od rozpatrywanego zadania dobiera się odpowiedni model. Na przykład, jeżeli chcemy wyznaczyć siły lub ruch we wszystkich głównych stawach człowieka, to przydatny będzie model przedstawiony na foliogramie 3-1. slajd 10A; jeżeli jednak interesują nas wyłącznie stawy kolanowe, to możemy zamodelować górną część ciała człowieka za pomocą jednego członu (np. człon nr 1 na foliogramie 3-1. slajd 10C ), co znacznie uprości model, a nie wpłynie znacząco na wyniki symulacji.
3-1. slajd 10
3-1. slajd 10A
3-1. slajd 10C
Dla danego biomechanicznego modelu wieloczłonowego wyprowadza się, stosując zasady mechaniki, równania ruchu układu, które mają postać równań różniczkowych zwyczajnych lub różniczkowo-algebraicznych. Liczba równań jest najczęściej na tyle duża, że ręczne ich wyprowadzenie nie jest praktycznie, ze względu na czasochłonność i możliwość pomyłek, wykonalne. Służą do tego specjalne, dostępne w handlu pakiety o działaniu symbolicznym (naśladują operacje ręczne i wyprowadzają równania w postaci symbolicznej) lub numerycznym (obliczają tylko aktualne w danej chwili wartości liczbowe członów równań).
yprowadzony model
matematyczny umożliwia rozwiązanie dwóch podstawowych typów zadań (3-1. slajd 11)
(3-1. slajd 11)
Należy podkreślić, że zarówno siły, jak i przemieszczenia punktów w czasie są wielkościami wektorowymi.
W biomechanice pracy prawie zawsze mamy do rozwiązania drugie z wymienionych zadań: dane są trajektorie - chcemy wyznaczyć siły. W tym przypadku pojawia się dodatkowa trudność: sił mięśniowych w organizmie człowieka jest więcej niż napędzanych przez nie ruchów w stawach. Przeważnie dany ruch (np. zginanie w stawie łokciowym) jest skutkiem jednoczesnego działania kilku lub nawet kilkunastu mięśni (tzw. zagadnienie współdziałania mięśni). Skutkiem tego, w modelu matematycznym danego zadania liczba niewiadomych sił mięśniowych jest większa niż liczba równań. Taki układ równań ma nieskończenie wiele rozwiązań. Możliwe są dwa sposoby postępowania.
Stosując pierwszy z nich, redukujemy liczbę niewiadomych, przyjmując, że niewiadomymi są nie siły rozwijane przez poszczególne mięśnie, lecz momenty wypadkowe sił rozwijanych przez grupy mięśni względem osi obrotów w stawach (tzw. momenty netto sił mięśniowych). Zaletą tego postępowania jest to, że uzyskujemy jednoznaczne rozwiązanie. Ponadto, wyznaczone momenty wypadkowe grup mięśniowych można porównać np. z momentami maksymalnymi, doświadczalnie zmierzonymi na specjalnych stanowiskach badawczych dla danej populacji pracowników. Można w ten sposób zorientować się, czy dana praca fizyczna mieści się w możliwościach danej populacji [15]. Może to być jednak mylące. Na stanowisku badawczym, w specjalnych standardowych warunkach, umożliwia się badanemu, przez odpowiednią stabilizację jego ciała wewnątrz stanowiska, selektywne rozwijanie maksymalnych momentów statycznych określonych grup mięśniowych, np. tylko mięśni zginaczy lub tylko mięśni prostowników w danym stawie. W warunkach rzeczywistych, szczególnie w ruchu, zazwyczaj pracują równocześnie zarówno grupy mięśni synergistycznych, jak i antagonistycznych, a moment wypadkowy netto jest różnicą wypadkowych momentów sił tych grup. Wynika to z konieczności stabilizacji postawy ciała poprzez blokadę, za pomocą sił mięśniowych zbędnych w danym momencie, stopni swobody ruchu ciała. Moment netto nie może być więc porównywany z momentami zmierzonymi na stanowisku.
W celu oszacowania sił rozwijanych przez poszczególne mięśnie (drugi sposób postępowania) należy spośród nieskończenie wielu rozwiązań wybrać ten zestaw sił mięśniowych spełniających układ równań modelu, który spełnia jakieś dodatkowe kryterium. Tak więc, rozwiązania poszukuje się metodą optymalizacji, przyjmując, że mięśnie w organizmie działają zgodnie z jakimś racjonalnym kryterium, np. minimalizują wydatkowaną energię lub inne wskaźniki: sumę sił mięśniowych, sumę sił reakcji w stawach itd. Kryteria optymalizacyjne przyjmowane są arbitralnie [8,24].
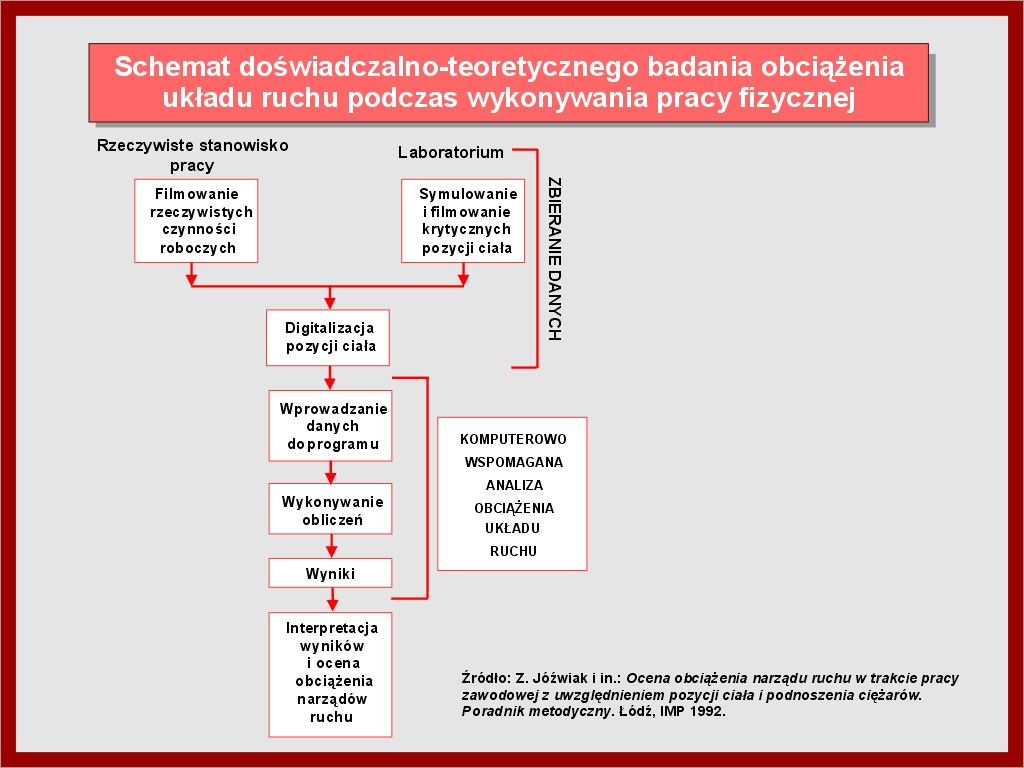
Modelowanie układu ruchu człowieka za pomocą układu wieloczłonowego jest obecnie sposobem dominującym w biomechanice pracy. Przyczynił się do tego fakt, że ten sposób modelowania można przetworzyć na pakiet oprogramowania, który mogą stosować nawet użytkownicy nie mający specjalistycznego przygotowania z mechaniki i matematyki. Typowy sposób postępowania przy użytkowaniu takiego oprogramowania przedstawiono na slajdzie 3-1. slajd 12 [14].
3-1. slajd 12
Część wstępna postępowania ma charakter doświadczalny i polega na filmowej rejestracji, najczęściej z częstotliwością około 60 klatek na sekundę, rzeczywistych (na rzeczywistym stanowisku pracy) lub symulowanych (na stanowisku pracy zaaranżowanym w laboratorium) ruchów ciała podczas pracy fizycznej. W przypadku, gdy badamy daną, uważaną za krytyczną, pozycję ciała w warunkach pracy statycznej (tj. bez uwzględnienia sił bezwładności), wystarczy sfotografowanie tej jednej pozycji. Analiza statyczna jest bowiem szczególnym przypadkiem analizy ciała człowieka w ruchu. Kolejna czynność to przetworzenie danych z filmu na zrozumiałą dla komputera postać cyfrową (digitalizacja). Klatka po klatce należy odczytać i zapisać w postaci liczb współrzędne wybranych i oznaczonych markerami punktów ciała. Służą do tego specjalne urządzenia półautomatyczne lub automatyczne. Zebrane dane wprowadza się do programu, który na ich podstawie przeprowadza analizę obciążenia układu ruchu i prezentuje wyniki w postaci tabel i wykresów.
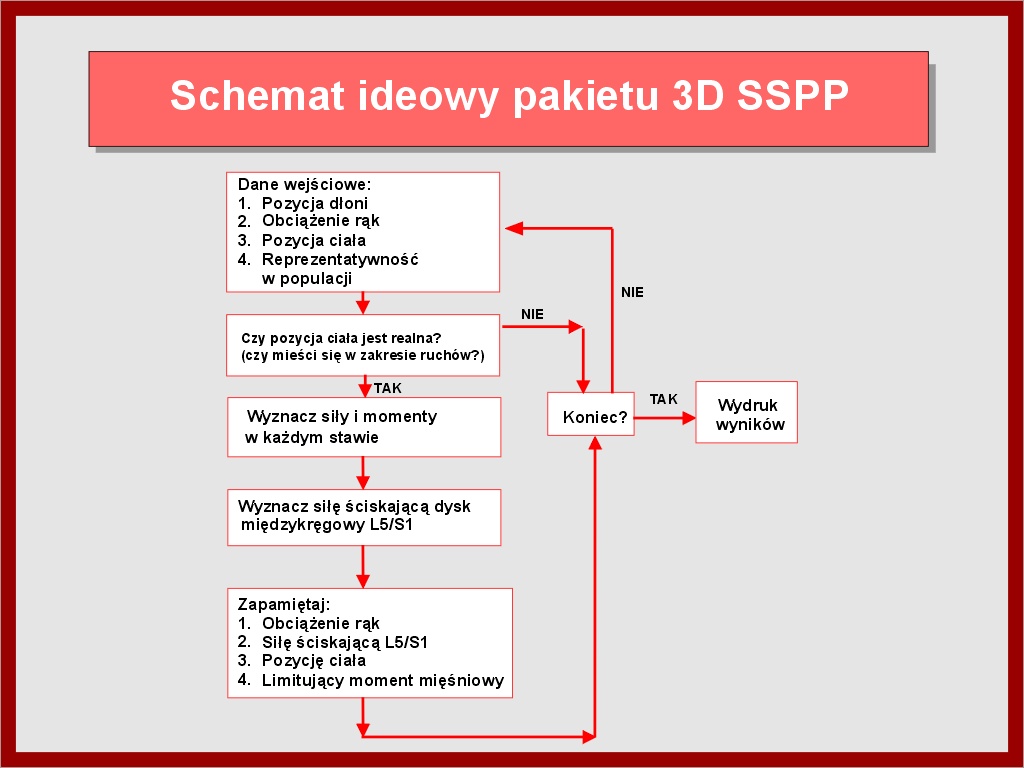
obrym przykładem oprogramowania, wykorzystującego model wieloczłonowy i służącego do analizy obciążeń ciała człowieka oraz wynikających z nich zagrożeń dla zdrowia, jest pakiet 3D SSPP (Three Dimensional Static Strength Prediction Program), [25]. Jest on często stosowany w wielu ośrodkach na świecie do analizy istniejących lub projektowania nowych stanowisk pracy w warunkach statycznych (ruchy powolne, można pominąć wpływ sił bezwładności). Stosowany w tym pakiecie model ciała człowieka składa się z 12 sztywnych członów (części ciała: górna część tułowia wraz z głową, dolna część tułowia, ramiona, przedramiona z dłońmi, uda, podudzia, stopy) połączonych przegubami (stawy), (3-1. slajd 13), [5,6].
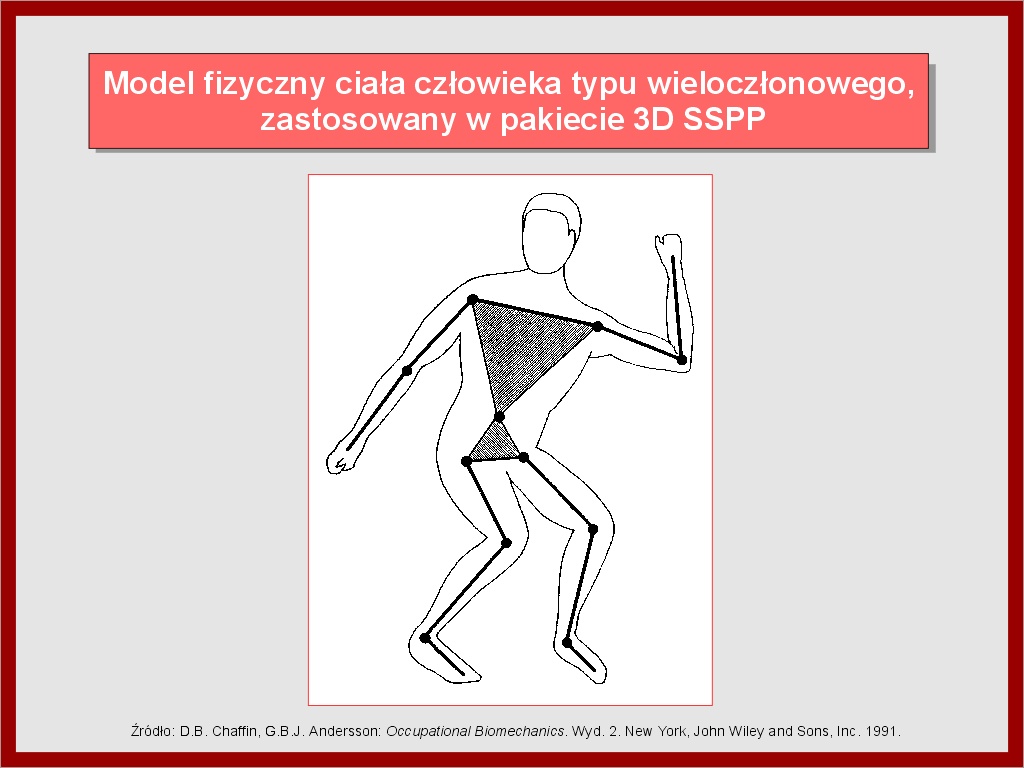
(3-1. slajd 13)
3-1. slajd 14
Do znanych i stosowanych pakietów oprogramowania, w których są wykorzystane modele wieloczłonowe do analizy obciążenia układu mięśniowo-szkieletowego człowieka w warunkach pracy statycznej, należą także: fiński pakiet ErgoSHAPE i kanadyjski WATBAK [12,22]. Ich działanie w zakresie analizy biomechanicznej jest podobne do działania pakietu 3D SSPP.
Obecnie brak jest wyspecjalizowanych i równie rozpowszechnionych pakietów tego typu do analizy biomechaniczno-ergonomicznej układu ruchu człowieka w warunkach dynamicznych (ruchy szybkie, nie można pominąć sił bezwładności). W ramach pakietów ogólnego przeznaczenia, stosowanych głównie do analizy metodą wieloczłonową układów mechanicznych (maszyn, robotów), spotyka się programy umożliwiające analizę biomechaniczną, np. program ANDROID w ramach znanego i rozpowszechnionego pakietu ADAMS [1]. Program ten zawiera bazę danych antropometrycznych dla zaprogramowanego modelu ciała człowieka. Za pomocą pakietów uniwersalnych można także budować własne modele ciała człowieka, o dowolnym podziale na człony sztywne, i - rozwiązując zadania odwrotne - wyznaczać momenty w stawach modelu w dowolnej chwili w trakcie analizowanego ruchu.
trakcie dalszej analizy dynamicznej pojawiają się jednak pewne trudności. Po pierwsze, wyznaczone momenty w stawach nie mogą być uznane za momenty netto sił mięśniowych. W analizie dynamicznej należy bowiem uwzględnić momenty pochodzące od tłumienia w aparacie ruchu człowieka. Po drugie, trzeba wziąć pod uwagę, że momenty sił mięśniowych bardzo silnie i nieliniowo zależą od prędkości kątowych ruchów w stawach, a odpowiednie opisy tych zależności są na razie znane w przybliżeniu. Z tego powodu analiza dynamiczna stosowana jest głównie do szacowania sił zewnętrznych działających na ciało człowieka i sił reakcji w stawach podczas wypadków samochodowych, motocyklowych [19], lotniczych, kolejowych itp. Do popularniejszych, stosowanych do tego celu pakietów oprogramowania należą MADYMO (3-1. slajd 15) i PAM-SAFE™ [23].
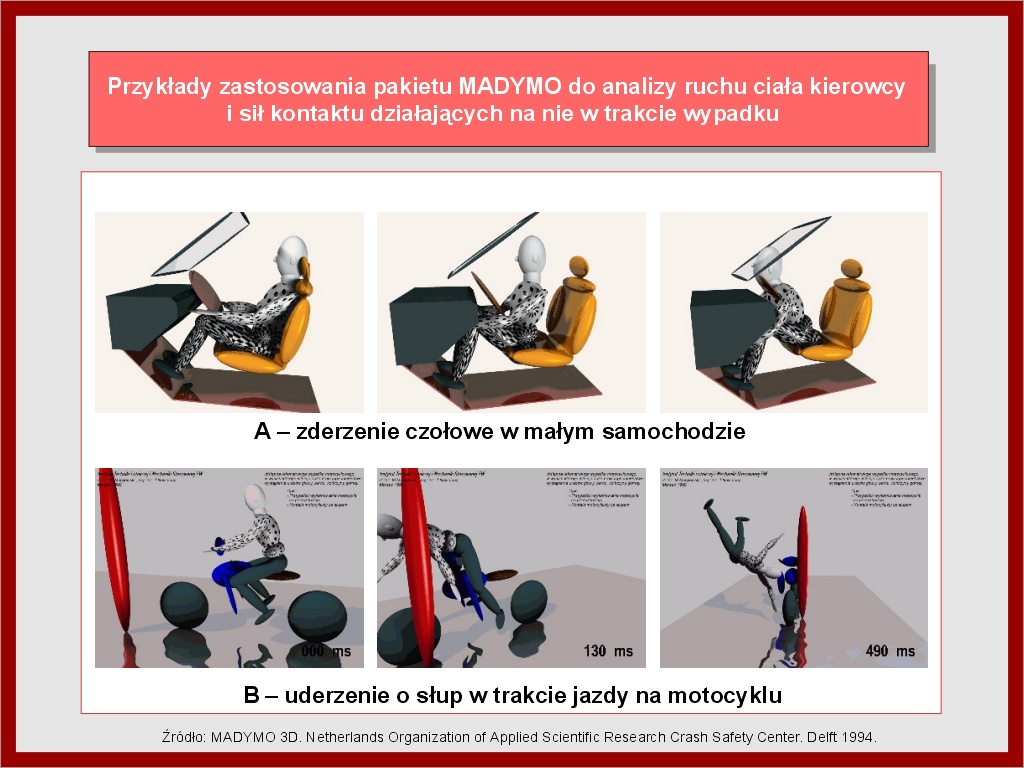
3-1. slajd 15
Drugi, stosowany w biomechanice pracy sposób tworzenia modeli fizycznych (o parametrach rozłożonych) polega na dokładnym odwzorowaniu geometrii ciała lub fragmentu ciała człowieka (np. tułowia, segmentu ruchowego kręgosłupa) za pomocą bardzo dużej liczby elementów. Są to tzw. elementy skończone (stąd nazwa: Metoda Elementów Skończonych, w skrócie MES), którym można przypisać - w zależności od potrzeby, czyli od celu rozwiązywanego zadania - określone właściwości geometryczne, materiałowe i inne. Opis matematyczny tych modeli jest bardzo złożony. Ma on postać bardzo rozbudowanych układów równań (w biomechanice: od kilkuset do kilkunastu tysięcy - zależnie od wielkości modelowanego fragmentu ciała), których wygenerowanie i rozwiązanie możliwe jest jedynie za pomocą specjalnych metod komputerowych. Modele takie umożliwiają nie tylko wyznaczenie sił wewnętrznych, lecz także - co bardzo ważne w biomechanice pracy - określenie rozkładów naprężeń i odkształceń w układzie mięśniowo-szkieletowym człowieka [4,8,10,11].
Metoda MES jest w ostatnich latach coraz częściej stosowana do modelowania układu mięśniowo-szkieletowego, ponieważ jej zaletami są:
Metoda Elementów Skończonych jest szeroko stosowana w praktyce inżynierskiej w różnych dziedzinach techniki. Jednak w przypadku zastosowania jej do modelowania układu mięśniowo-szkieletowego należy uwzględnić różne specyficzne własności tego układu, które nie są spotykane w typowych konstrukcjach inżynierskich, np. to, że:
Typowe, dostępne na rynku, inżynierskie pakiety MES (ANSYS, NASTRAN i inne) są już na tyle zaawansowane, że można próbować wykorzystywać je do budowy modeli ciała człowieka. Próby takie są jednak nieliczne, a tworzone modele, budowane za pomocą pakietów handlowych lub własnego oprogramowania, mają głównie charakter badawczy. Podstawowymi przeszkodami w tworzeniu modeli MES ciała człowieka są: bardzo złożona budowa anatomiczna ciała oraz brak wiarygodnych, potrzebnych do modelowania danych o właściwościach materiałów biologicznych (tkanek), a także duży rozrzut wartości tych właściwości. Próby zbudowania za pomocą MES tzw. wiernych biologicznie modeli ciała są podejmowane głównie na potrzeby biomechaniki zderzeń, w celu - dokładniejszego niż to jest możliwe za pomocą modeli typu wieloczłonowego - prognozowania skutków wypadków komunikacyjnych. Pierwsze modele MES fragmentów ciała pojawiły się ostatnio we wspomnianych już pakietach MADYMO i PAM-SAFE™.
W biomechanice pracy fizycznej pierwszym zastosowaniem modelu typu MES jest metoda pod nazwą ErgoMES, służąca do oceny obciążenia układu ruchu w procesie pracy. Metoda została opracowana w Centralnym Instytucie Ochrony Pracy [13,14], przy współudziale Politechniki Warszawskiej [16]. W zastosowanym w niej modelu układu mięśniowo-szkieletowego całego ciała uwzględniono wszystkie składowe dynamiczne obciążeń układu ruchu człowieka (siły bezwładności, tłumienie) w trakcie symulacji dowolnych ruchów (np. czynności roboczych w trakcie pracy fizycznej) w pełnym zakresie kątów obrotów w stawach.
Model fizyczny układu
szkieletowego (3-1. slajd 16A,
3-1. slajd 16B,
3-1. slajd 16C)
zbudowano z 45 elementów sztywnych, modelujących te części ciała człowieka,
które są znacznie sztywniejsze (np. kości), bądź zakłada się, że są znacznie
sztywniejsze (np. segmenty kręgosłupa, stopy, dłonie), od innych elementów
(mięśni, ścięgien, dysków między sztywnymi segmentami kręgosłupa). Człony
sztywne są połączone między sobą specjalnymi elementami typu "sprężyna
- tłumik o sześciu składowych". Każdy z tych elementów składa się z sześciu
podzespołów, zbudowanych z działających równolegle sprężyny i tłumika:
trzech podzespołów liniowych, działających w trzech wzajemnie prostopadłych
kierunkach oraz trzech podzespołów skrętnych (kątowych), działających
wokół osi obrotu odpowiadających tym kierunkom.
3-1. slajd 16A 3-1. slajd 16B 3-1. slajd 16C
Model fizyczny układu
mięśniowego (3-1. slajd 16D)
(3-1. slajd 16D) 3-1. slajd 16 3-1. slajd 17 3-1. slajd 18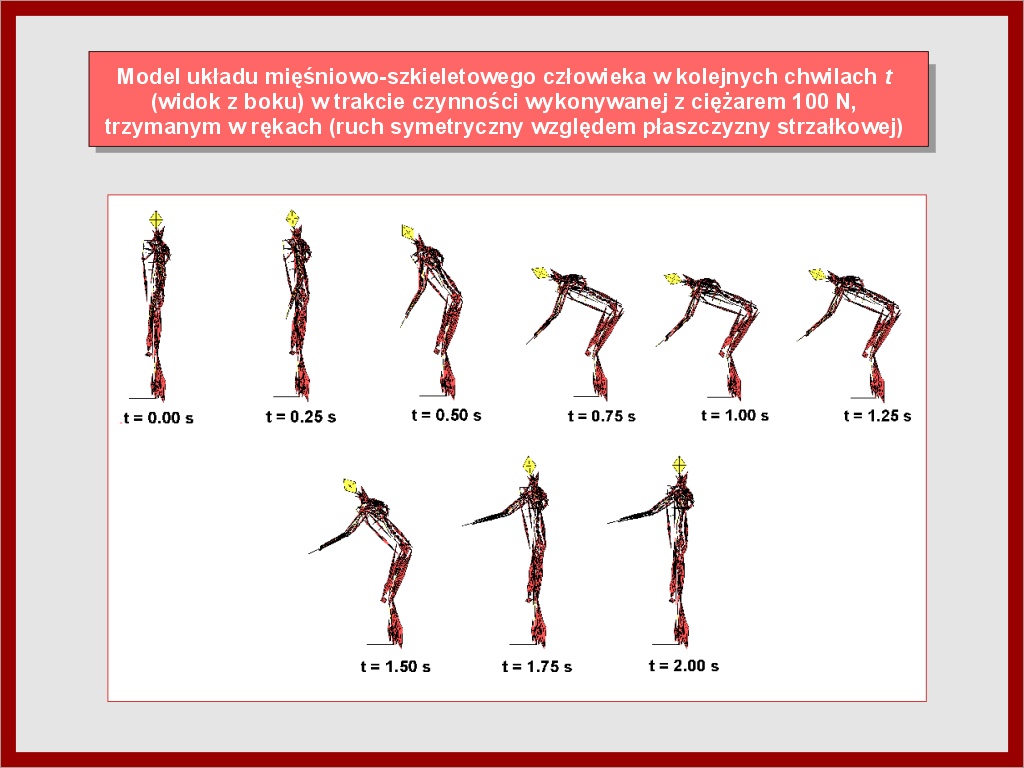
3-1. slajd 19
| 3-1.5. Literatura |