|
7-5. Metody modelowe w projektowaniu układów „człowiek-obiekt techniczny-środowisko” |
|
dr inż. Leonard Hempel - Politechnika Gdańska |
- w procesie myślenia (abstrakcyjne myślenie o zjawiskach fizycznych)
- w procesie komunikowania (rysunki, fotografie, szkice, schematy itp.)
- w procesie przewidywania (symulacja)
- w procesie sterowania (pulpity sterownicze)
- w procesie szkolenia (symulatory, trenażery).
- badanie technicznej dokumentacji i oprzyrządowania systemu
- obserwacje działalności operatora w procesie sterowania
- rejestracja obiektywnych wskaźników jego działalności
- eksperymentalne badanie elementów takiej działalności
- analiza błędów operatora
- eksperckie oceny poszczególnych wskaźników
- spotkania (wywiady) z operatorami.
- wymagane jest przeprowadzenie analizy działalności operatora w już działającym systemie, w celu ergonomicznej oceny tej działalności lub wykorzystanie otrzymanych danych przy projektowaniu systemu podobnego
- na podstawie dokumentacji projektowej lub już posiadanego oprzyrządowania należy ocenić warunki działania operatora w nowym systemie
- przy projektowaniu systemu C - OT potrzeba określić i zbadać pewne wskaźniki i warunki przyszłej działalności w nim człowieka - operatora.
- Metoda badania dokumentacji i oprzyrządowania pozwala zapoznać
się z zadaniami, które rozwiązuje (lub będzie rozwiązywał) operator,
i warunkami, w jakich działa ten operator. Na podstawie dokumentacji
itp. określa się:
- spis (wykaz) funkcji realizowanych przez operatora w systemie
- wymagania stawiane systemowi
- ograniczenia w zastosowaniu systemu
- obowiązki funkcjonalne operatora
- wymagania dotyczące operatora
- ograniczenia nakładane na działalność operatora.
Otrzymane wiadomości o pracy operatora mogą być rozszerzone o badanie odpowiednich instrukcji i specjalnych wytycznych dotyczących działalności operatora w systemie. Wszystkie te informacje można rozwiązać, prowadząc bezpośrednie badania obiektu technicznego i otoczenia, w którym pracuje operator (stanowiska roboczego, pulpitów sterowania, organów sterowania itp.).
- Metoda obserwacji działalności operatora. Jest ona bardzo efektywna
w przypadkach, kiedy ta działalność ma przeważnie „charakter ruchowy”.
Za pomocą tej metody można uzyskać dane dotyczące:
- kanałów otrzymywania informacji (z jakiego źródła, w jakiej objętości)
- charakterystyk nadchodzącej informacji [modalność sygnałów, (wartości cechy występującej najczęściej), modalność informacji, stopień kategoryczności: asertoryczne (jest tak a tak), apodyktyczne (musi być tak a tak)]
- kodowania sygnałów, ich zmian w czasie, znaczeniach
- obciążenia informatycznego, strat, charakterystyk przyjmowania
- sposobów wprowadzania działań sterujących (cech ruchów sterujących, ich kierunków, rodzaju antropometrycznych i siłowych charakterystyk, częstotliwości i powtarzalności ruchów, ich związków z pozycją roboczą)
- poziomu obciążenia, natężenia, napięcia, zmęczenia operatora (ocenionego po zachowaniu operatora, jego emocjonalnych reakcji, koncentracji uwagi na wykonywanych działaniach)
- zewnętrznych warunków działalności (liczby czynników naruszających normalne warunki życia, ich intensywności i długotrwałości).
Podczas tych badań należy pamiętać, aby:
- na wstępie wyraźnie określić te wskaźniki, które będą badane w konkretnej obserwacji
- określić miary dyskretności - elementarne jednostki działalności, z dokładnością, z jaką prowadzi się obserwacje.
- Metoda rejestracji obiektywnych wskaźników działania. W metodzie tej wykorzystuje się specjalistyczną aparaturę badawczą i pomiarową.
- Metoda eksperymentalnego badania elementów działalności. W tej metodzie eksperymentator narzuca badanemu swój program działania.
- analizy błędów operatora. W metodzie tej wyjaśnia się: zawartość błędu i przyczyny jego występowania, możliwości operatora do wykrywania w odpowiednim czasie błędów i ich usuwania oraz odwracania skutków błędów.
- Metoda oceny eksperckiej. Stosowana jest, gdy nie można metodą obiektywną ocenić poszczególnych charakterystyk i wskaźników działalności operatora. Do takich badań wykorzystuje się doświadczonych operatorów, którym zadaje się serię jednakowych pytań jednoznacznie sformułowanych.
- Metoda narad (spotkań) z operatorami. W spotkaniach biorą udział operatorzy o różnym stażu pracy i doświadczeniu. Każdy operator otrzymuje jednego typu, precyzyjnie sformułowane pytania.
- na poziomie systemu
- na poziomie poszczególnych (wydzielonych) operacji.
- analiza istniejącej lub hipotetycznej działalności w celu stworzenia nowej bardziej nowoczesnej
- analiza istniejącej działalności w celu jej optymalizacji
- analiza istniejącej lub formowanej działalności w celu jej modelowania i opisania (a następnie wykorzystania tego opisu do dokładniejszego poznania działalności).
- odzwierciedlania wykazu wykonywanych przez operatora funkcji (niekiedy z uwzględnieniem ich powiązań i warunków realizacji)
- odzwierciedlenia relacji, które łączą operatora z technicznymi ogniwami systemu
- jednoczesnego odzwierciedlenia wykazów funkcji i relacji.
- Metoda określania wykazu funkcji operatora w systemie (werbalne
wyliczenie i opis działań)
Na początku ustala się wykaz ogólny przewidywanych działań, które może wykonywać operator w danym systemie sterowania. Następnie dla każdego konkretnego sposobu wykorzystania tego systemu zaznacza się te funkcje, które faktycznie wykonuje operator. Po określeniu prawdopodobieństwa pojawienia się poszczególnych operacji można sporządzić wykaz podstawowych (zasadniczych) funkcji, które najczęściej wykonuje operator. W tabeli 1 (7-5. slajd 13) zamieszczono fragment wykazu sporządzonego przez G. Rabideau [4].
-
Autor dzieli funkcje operatora na odpowiednie grupy, wychodząc ze związanych z nimi procesów: percepcyjnych, decyzyjnych, komunikowania, motorycznych. W podobnych wykazach mogą być zestawione nie tylko prawdopodobieństwa wykonania poszczególnych funkcji, ale także wskaźniki dokładności i szybkości wykonania tej funkcji, prawdopodobieństwa pojawienia się błędów przy ich wykonywaniu, charakter tych błędów, stopień natężenia (napięcia) przy ich wykonywaniu itp.

(7-5. slajd 13)
- Metoda wieloczynnikowego ważenia
Istota tej metody polega na połączeniu w jednym ogólnym schemacie najbardziej istotnych czynników i wskaźników określających działalność operatora i przedstawiania tych zmiennych (różnych co do formy, zjawisk, zawartości itp.) z uwzględnieniem ich wag oraz związków w jednej standardowej formie. Metoda ta służy do przedstawienia, z uwzględnieniem hierarchii ważności i wzajemnych powiązań, działań wykonywanych przez operatora w badanym procesie. Aby przeprowadzić opis, należy wyróżnić wszystkie te wskaźniki działania i wszystkie czynniki, których wpływ na badaną działalność uważa się za najbardziej istotny. Następnie, należy określić wszystkie te różnorodne wskaźniki za pomocą bezwymiarowych liczb, np. współczynników wagi lub stopni. W zależności od przypisanego im poziomu hierarchii ważności w badanej funkcji nanosi się je w odpowiedniej podziałce na wykres, uzyskując charakterystyczny dendryt. Długość poszczególnych gałęzi symbolizuje wagę każdego kryterium lub czynnika w działalności operatora. Zasadę tworzenia dendrytu pokazano na foliogramie 7-5. slajd 14 ).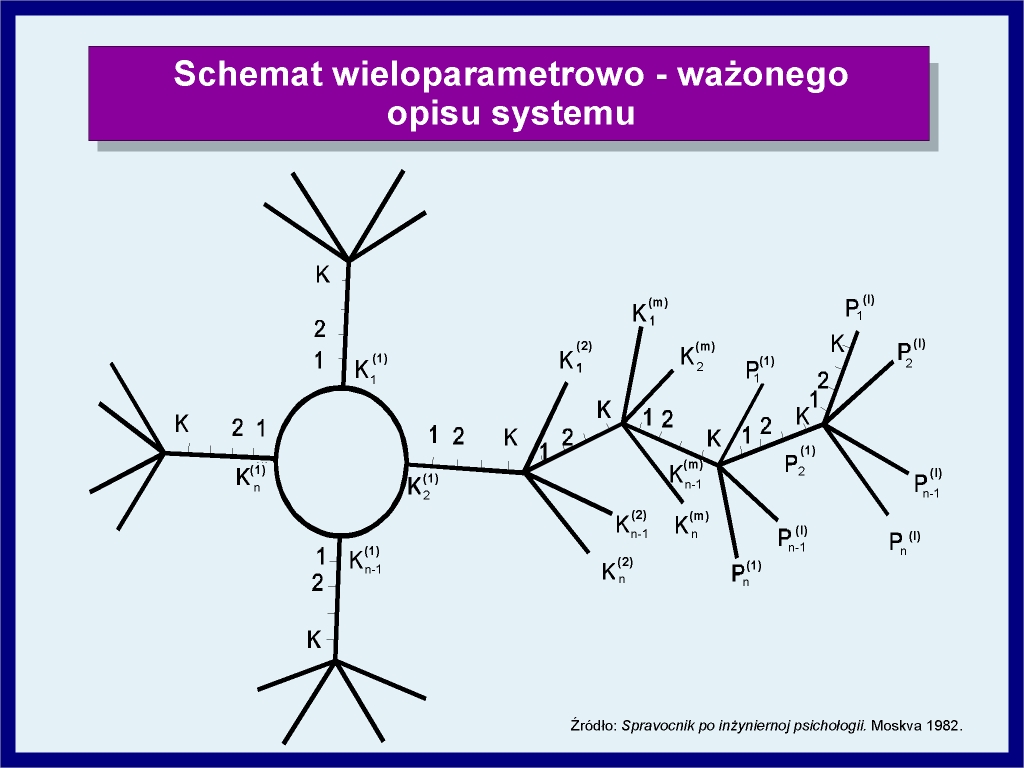
7-5. slajd 14
- Metoda opisu organizacji przestrzennej
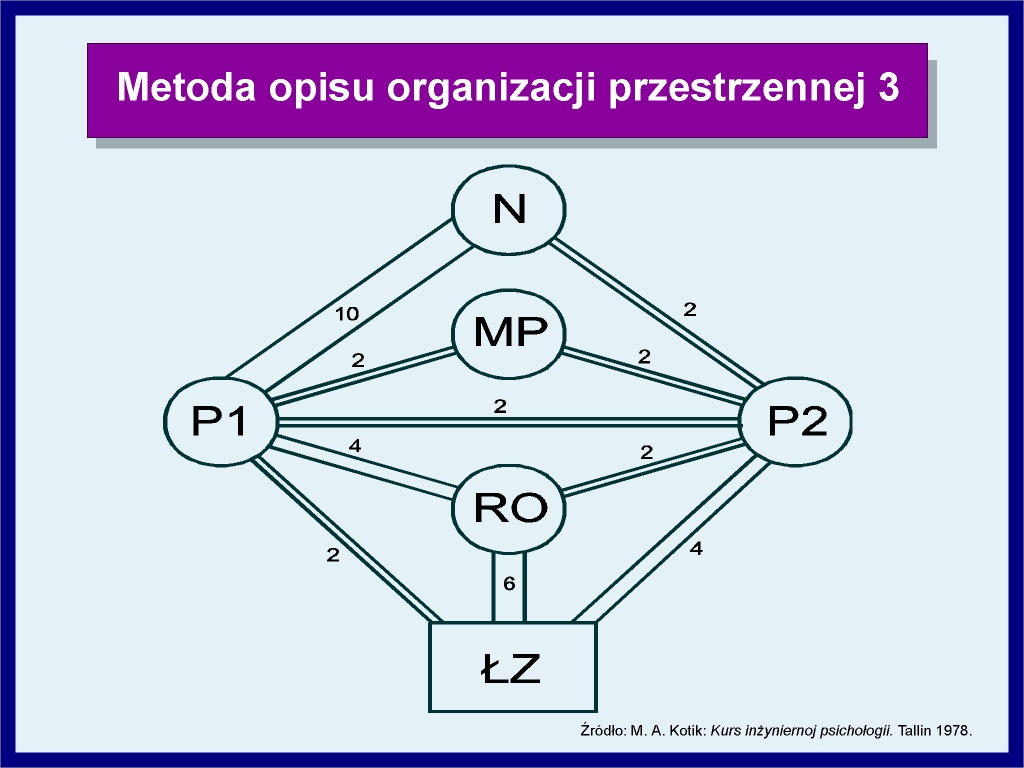
Celem opisu działania operatora jest ustalenie i analiza wzajemnego położenia operatora i technicznych elementów systemu oraz występujących między nimi połączeń informacyjnych. Przykłady stosowania tej prostej i wygodnej metody pokazano na foliogramach. Foliogram 7-5. slajd 15ilustruje sposób prezentowania połączeń informacyjnych operatora sterującego zespołem obiektów technicznych Omawiana metoda może być również zastosowana do badania przebiegu informacji między grupą operatorów w systemie sterowania (załoga statku, załoga samolotu itp.).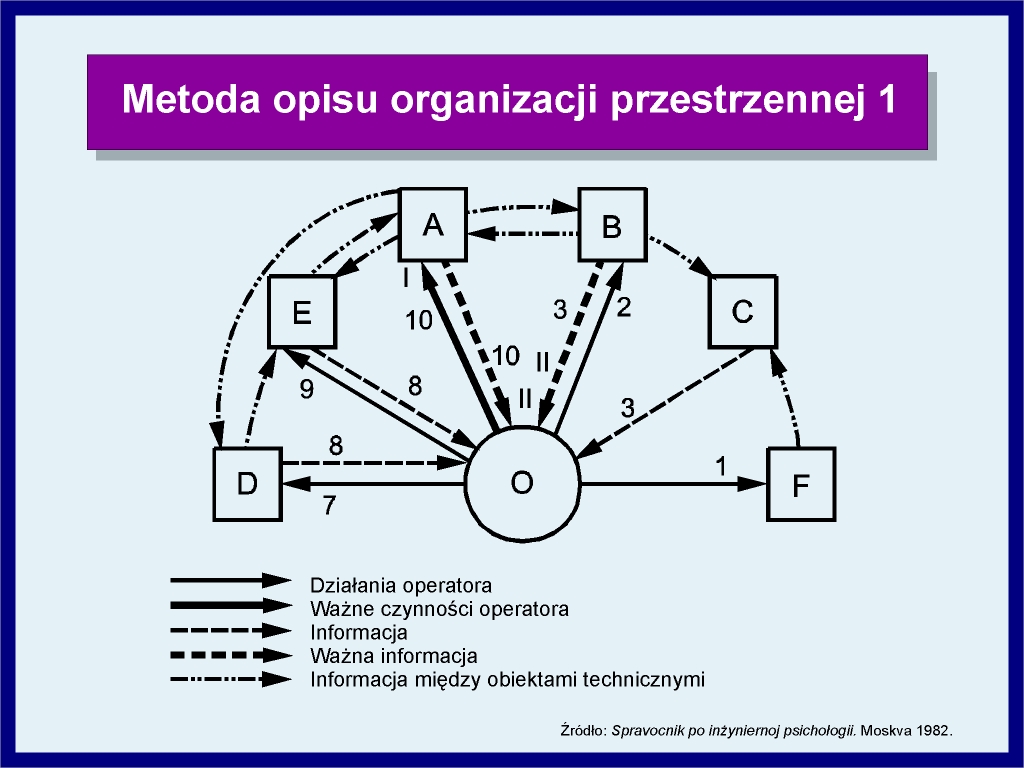
7-5. slajd 15
Stosowaną przez M. de Montmollin metodę opisu organizacji przestrzennej pulpitu sterowania pokazano na foliogramie 7-5. slajd 16 .Na foliogramie 7-5. slajd 17 przedstawiono schemat służący do analizy obciążenia kanałów łączności między członkami załogi samolotu, a na foliogramie 7-5. slajd 18 zamieszczono przykład formularza do oceny liczebności połączeń radiowych załogi samolotu w czasie określonego etapu lotu.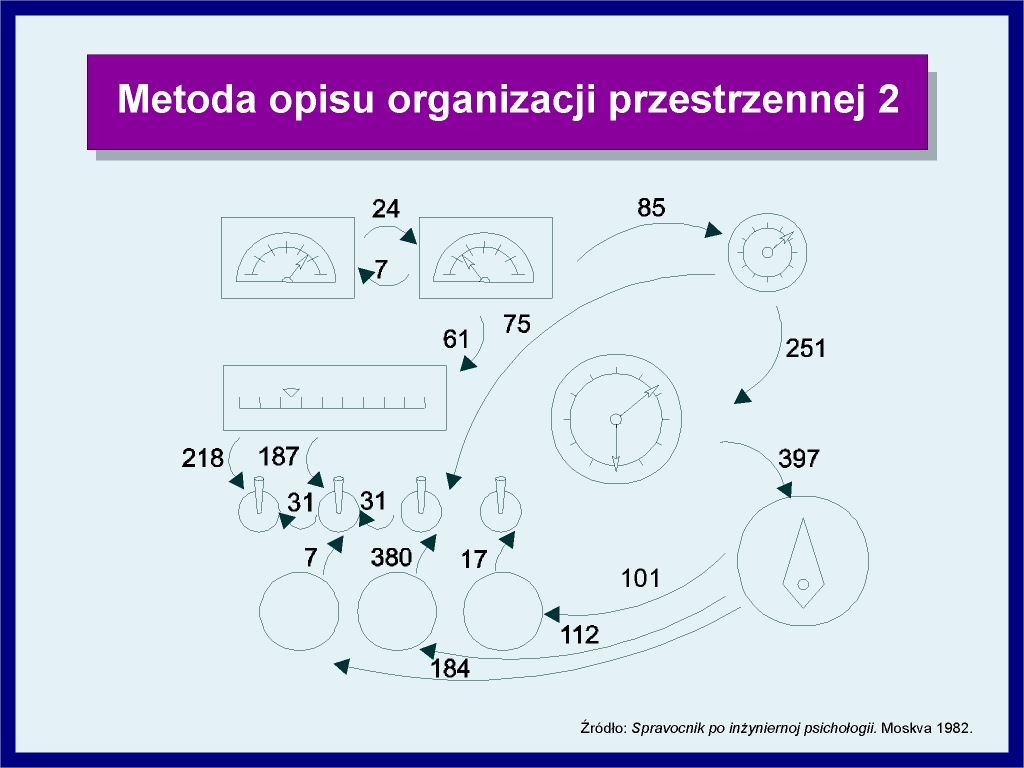
7-5. slajd 16
7-5. slajd 17
Po przeprowadzeniu odpowiedniej liczby badań wyniki można opracowywać statystycznie.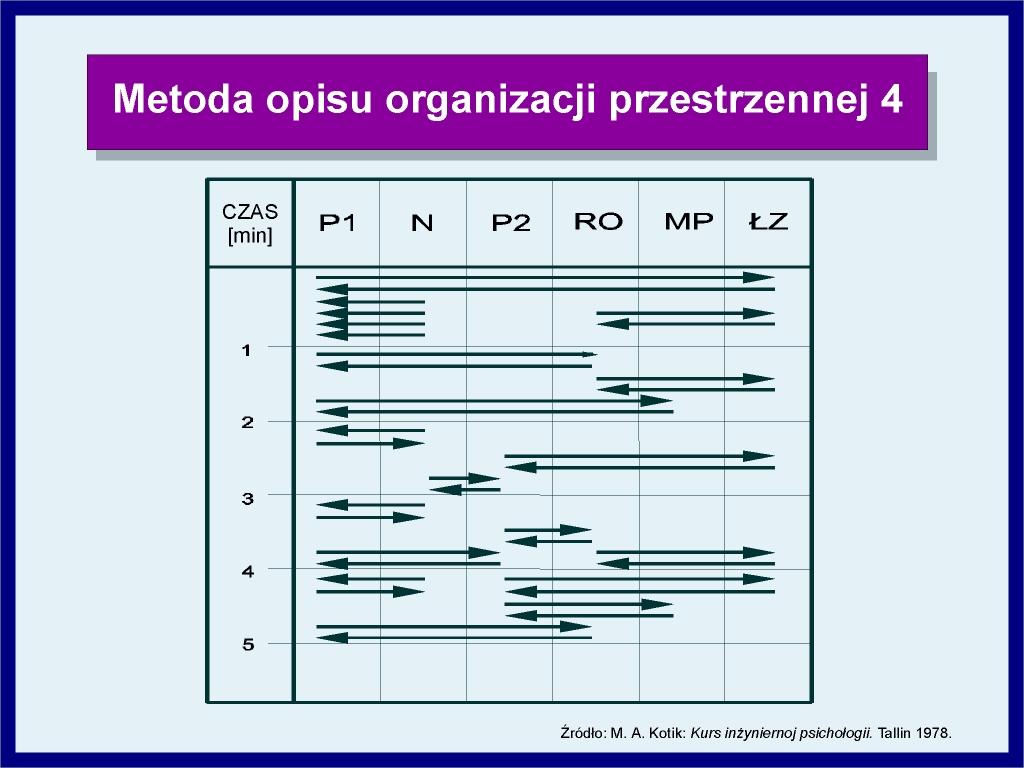
7-5. slajd 18
-
-
7-5. slajd 19
| 7-5.1. Wprowadzenie |
Projektowanie techniczne i ergonomiczne stanowi jedność, podporządkowaną temu samemu celowi. Poszczególne kroki projektowe muszą być szczegółowo określone co do celów, zakresu pracy i formy dokumentacji [6]. Projektowanie obiektów technicznych przez długie lata pozwoliło wypracować określone sposoby przedstawiania projektowanych i badanych obiektów technicznych. Zaistniała konieczność opracowywania, spełniających wymieniony postulat, coraz to doskonalszych modeli systemów „człowiek-obiekt techniczny-otoczenie”.
| 7-5.2. Podstawowe sposoby korzystania z modeli |
Jednym z narzędzi badania i projektowania jest modelowanie, które można ogólnie określić jako proces uproszczonego przetwarzania rzeczywistości. V. Krick [7] rozróżnia następujące sposoby korzystania z modeli w działalności inżynierskiej ( 7-5. slajd 2):
7-5. slajd 2
| 7-5.3. Rodzaje modeli |
| 7-5.3.1. Modele graficzne |
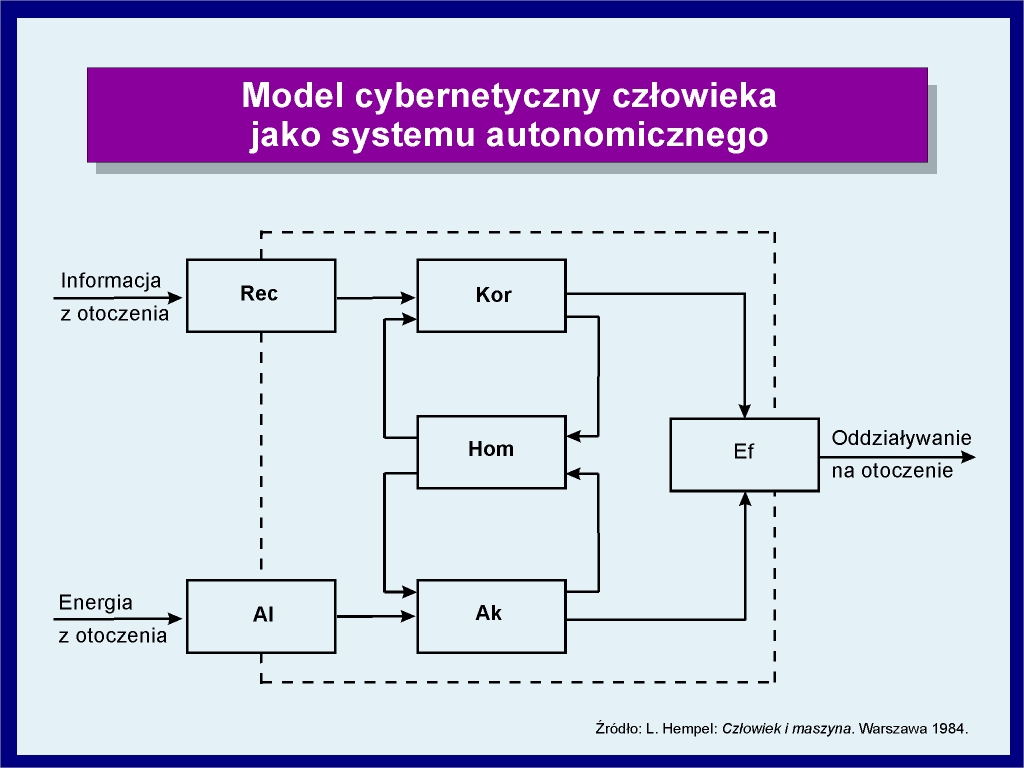
W zależności od celu stosuje się modele o różnym stopniu uproszczenia, od prostych modeli graficznych do skomplikowanych modeli organizmu stosowanych np. podczas badań wypadków komunikacyjnych. Najliczniejszą grupę modeli stanowią modele cybernetyczne, stosowane z powodzeniem tam, gdzie analizuje się strumienie informacji. Model człowieka jako systemu autonomicznego ( 7-5. slajd 3) może być wykorzystany np. przy ocenie niezawodności człowieka.
7-5. slajd 3
Inną grupę modeli stosowaną w projektowaniu są sylwetki człowieka - fantomy. Ciało człowieka przedstawia się w rzutach na płaszczyznę strzałkową (prostopadłą do płaszczyzny czołowej) oraz na płaszczyznę poprzeczną (7-5. slajd 4).
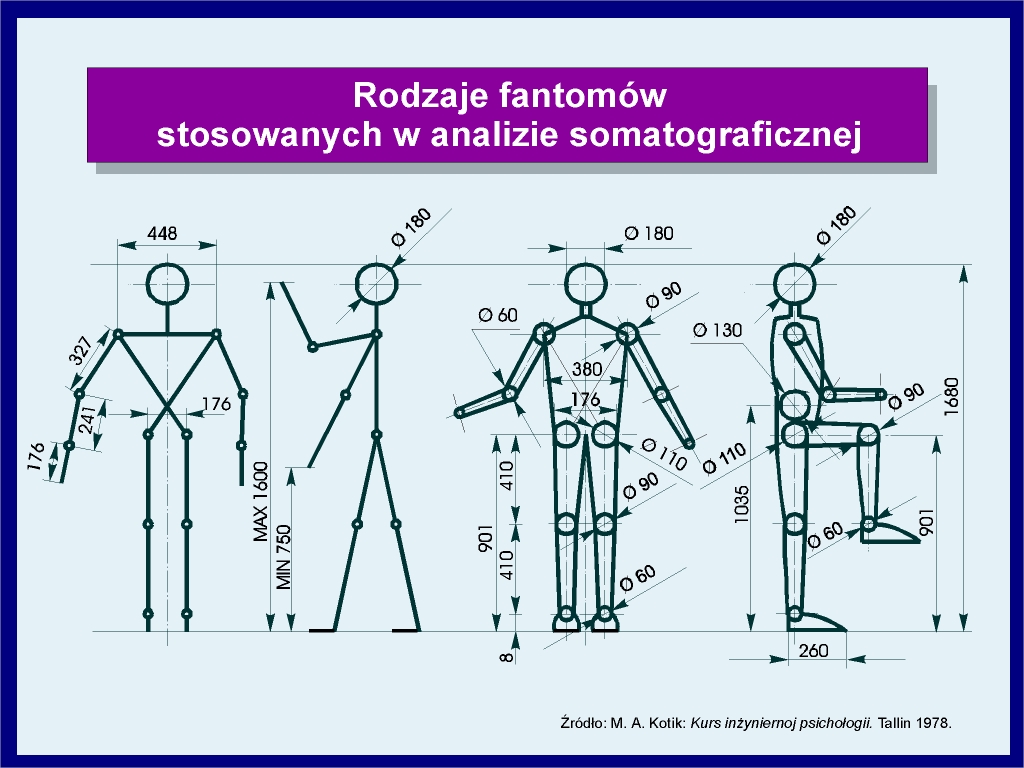
(7-5. slajd 4)
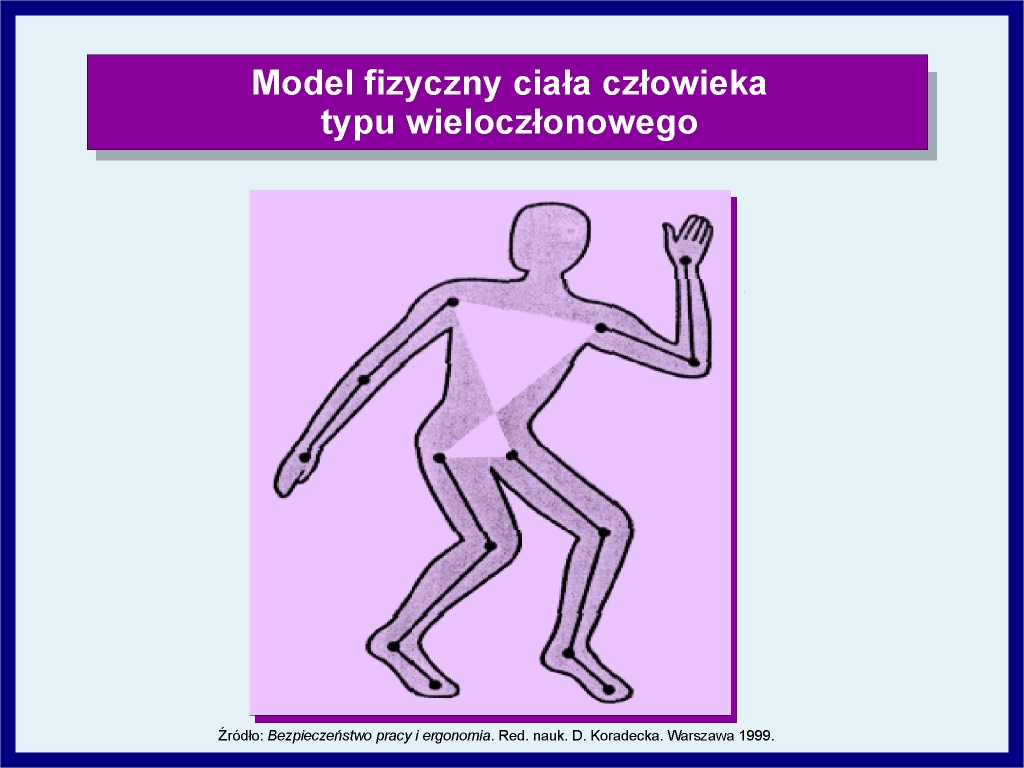
Do analizy kinetycznej używa się modeli strukturalnych umożliwiających obliczanie stopnia ruchliwości (w) szkieletu człowieka traktowanego jako łańcuch kinematyczny. Modele takie tworzy się dla całego ciała lub dla jego poszczególnych części, np. dla szkieletu człowieka (7-5. slajd 5).
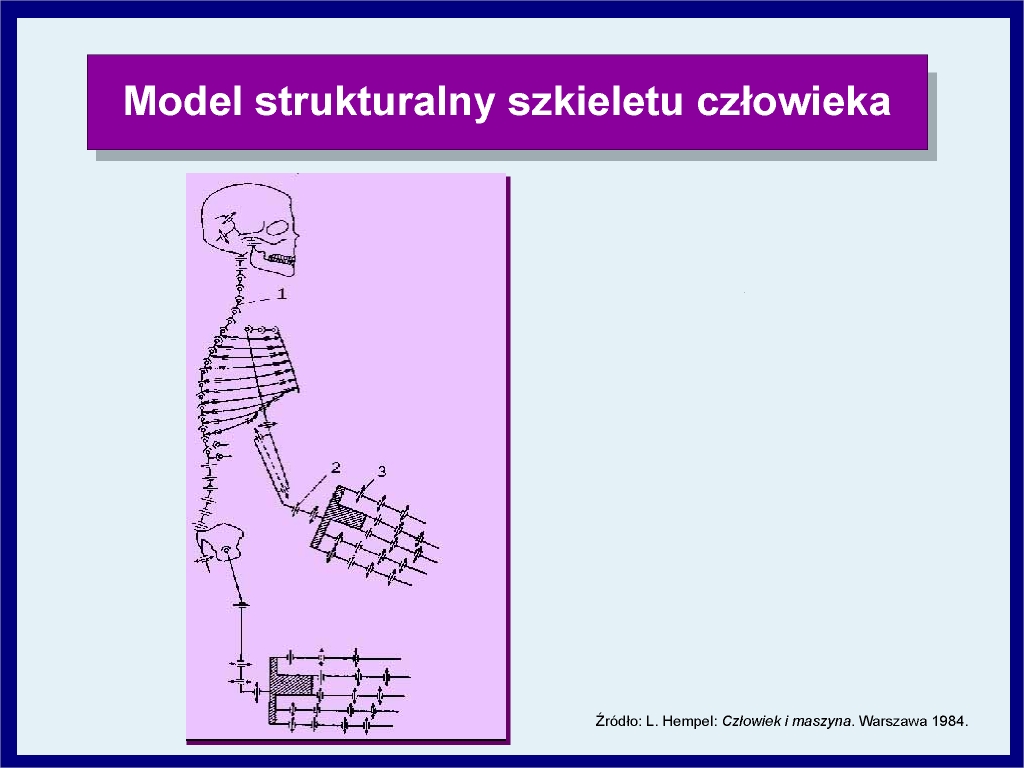
(7-5. slajd 5)
Inny rodzaj modeli stosuje się przy analizowaniu częstości drgań poszczególnych części ciała człowieka. Firma Bruel and Kjaer publikuje model reologiczny człowieka (7-5. slajd 6)
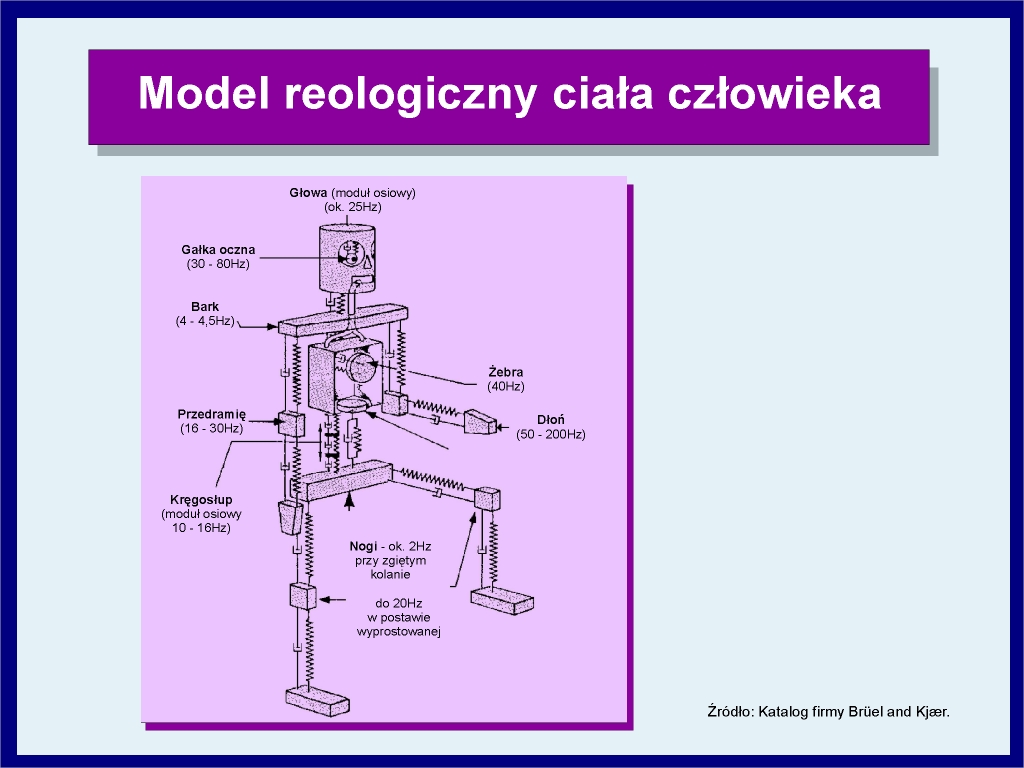
(7-5. slajd 6)
| 7-5.3.2. Symulacja komputerowa |
Symulacja komputerowa należy do projektowych metod badawczych w biomechanice pracy. Badania biomechaniczne dostarczają projektantom bardzo wielu cennych parametrów opisujących możliwości fizyczne człowieka. Bada się właściwości kinematyczne i dynamiczne organizmu, właściwości wytrzymałościowe układu kostno-szkieletowego i mięśniowego. Schemat takiego modelowania pokazano na foliogramie ( 7-5. slajd 7).
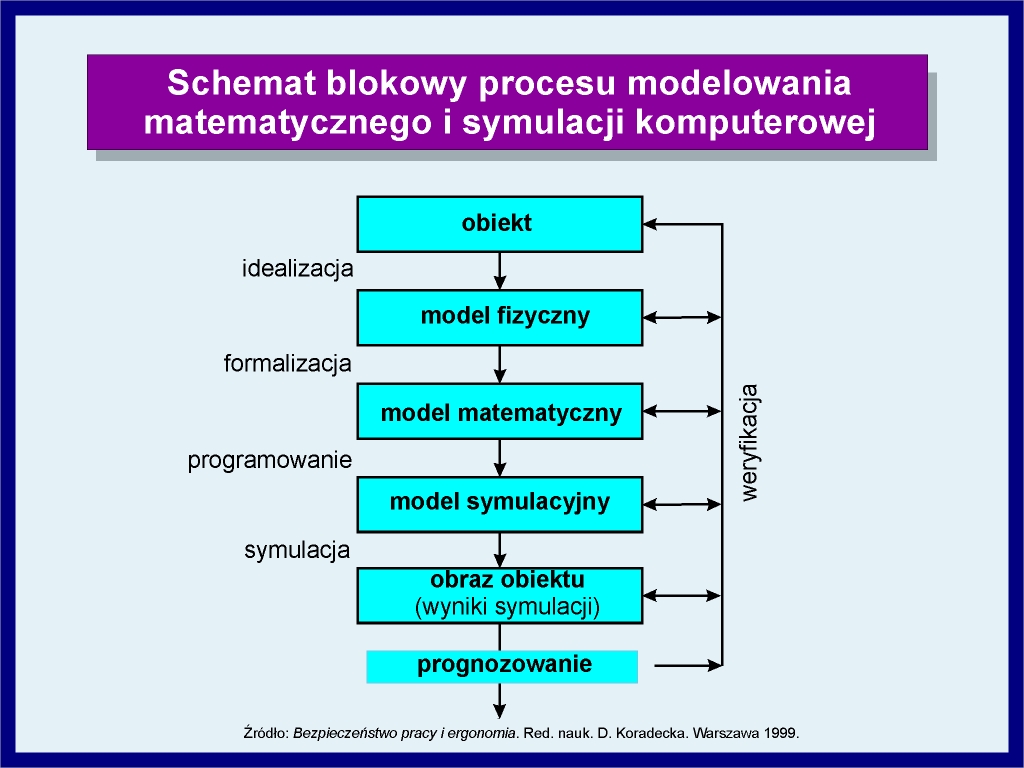
7-5. slajd 7
Komputerowy zapis konstrukcji pozwala nie tylko odwzorowywać statyczne fazy tego współdziałania, ale również modelować środowisko pracy człowieka przy zastosowaniu modelowania trójwymiarowego. Stosuje się tutaj takie programy, jak na przykład: APOLIN, SAMMIE, ANTHROPOS, DIANA czy ErgoSHAPE, będący nakładką popularnego edytora rysunku AutoCAD. Do kształtowania postaci konstrukcyjnej maszyn i stanowisk pracy z uwzględnieniem wymogów bezpieczeństwa pracy i ergonomii najlepiej nadaje się modelowanie bryłowe, które umożliwia powiązanie OT i O z trójwymiarowym modelem człowieka. Najnowszym sposobem wizualnego przedstawiania obiektów trójwymiarowych jest stosowanie techniki VR (wirtualnej rzeczywistości). Technika ta pozwala nie tylko kształtować (projektować) systemy C - OT - O, ale pozwala już na etapie projektowania „wykonywać” wszystkie czynności związane z całym okresem „życia” obiektu, tj. od produkcji poprzez eksploatację do kasacji [wg 1]. Pozwala to na wykrywanie sytuacji niebezpiecznych i możliwych zagrożeń oraz na szkolenie przyszłych eksploatatorów.
Współczesne modelowanie w biomechanice stosuje dwa podstawowe typy modeli fizycznych: o parametrach (masa, sztywność, dane materiałowe, modele ciała) skupionych lub rozłożonych.
Stosuje się też modele mierzone. Modele o parametrach złożonych służą do modelowania całego ciała lub jego części w pełnym zakresie kątów obrotów w głównych stawach oraz w różnych sytuacjach statycznych.
Przykładem takiego modelowania komputerowego jest patent 3DSSp (Three Dimensional Static Strength Prediction). Służy on do analizy obciążeń ciała człowieka oraz wynikających z nich zagrożeń dla zdrowia. Model fizyczny ciała człowieka, na którym prowadzi się badania obciążenia, przedstawiono na foliogramie (7-5. slajd 8)
(7-5. slajd 8)
Drugi typ modeli fizycznych o parametrach rozłożonych jest tworzony metodą trójwymiarowego odwzorowania ciała lub fragmentu ciała człowieka za pomocą dużej liczby elementów, tzn. elementów skończonych, którym przypisuje się, w zależności od celu badania, określone właściwości (7-5. slajd 9).

(7-5. slajd 9)
Dobre wyniki uzyskuje się wykorzystując symulację komputerową do optymalizacji przestrzeni pracy kończyn człowieka - operatora. Na foliogramie (7-5. slajd 10) przedstawiono przykład wyników optymalizacji przestrzeni pracy dla prawej górnej kończyny.
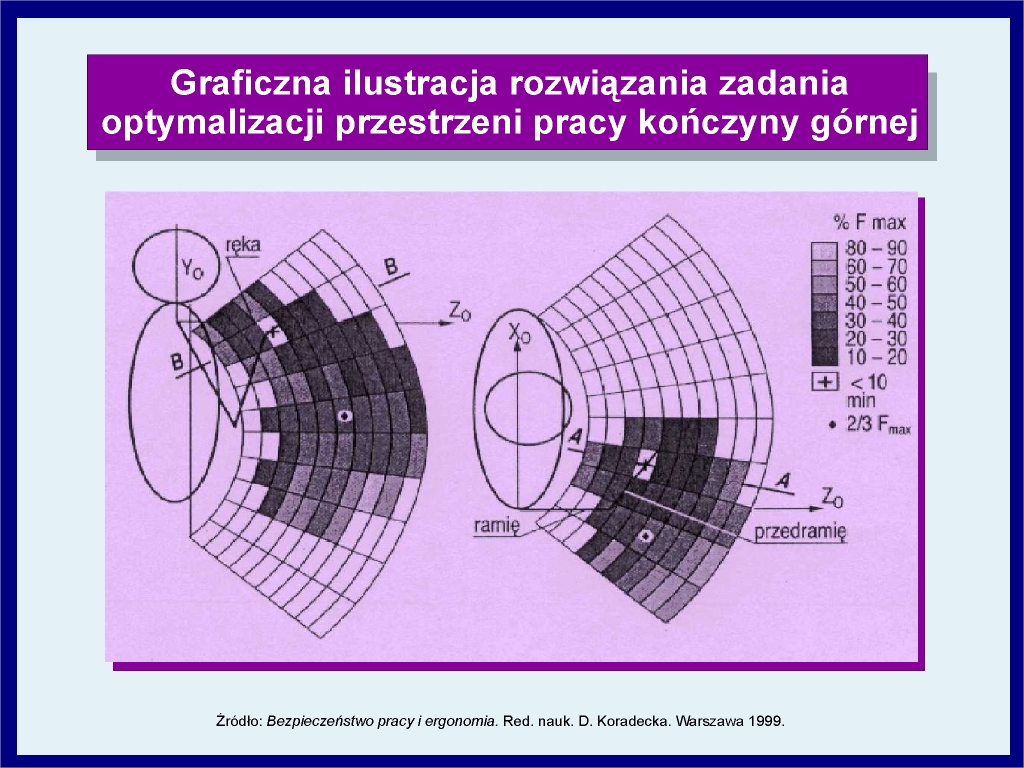
(7-5. slajd 10)
Bliżej z zagadnieniami symulacji komputerowej można zapoznać się w rozdz. 6 monografii „Bezpieczeństwo pracy i ergonomia” [1].
| 7-5.4. Prace badawczo-rozwojowe dla potrzeb projektowania systemów antropotechnicznych |
| 7-5.4.1. Typologia prac ergonomicznych |
Aby projektowanie ergonomiczne spełniało swoje zadanie, tj. stało się jednym z czynników zapewniających sukces wyrobu na rynku, musi być zasilane przez inne rodzaje działalności ergonomicznej w przedsiębiorstwie [6]. Typologię prac ergonomicznych w ośrodku badań i rozwoju w nowoczesnym przedsiębiorstwie branży maszynowej przedstawiono na foliogramie 7-5. slajd 11).
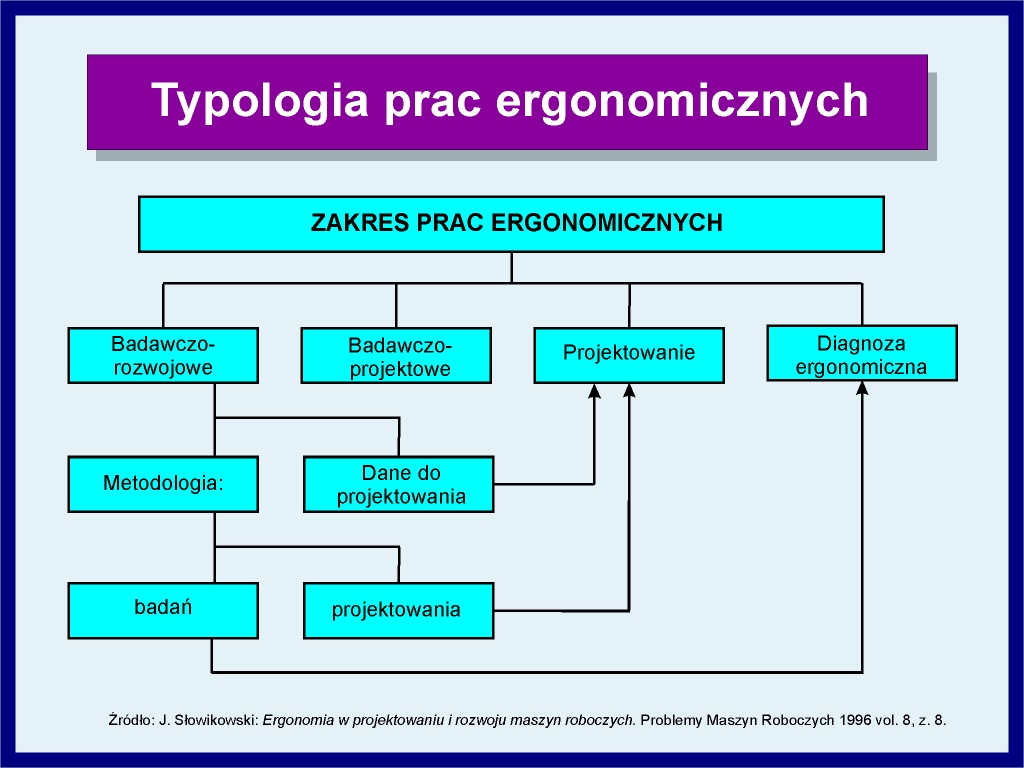
7-5. slajd 11
| 7-5.4.2. Wybrane sposoby pozyskiwania danych o działalności operatorów |
Jednym z ważniejszych problemów projektowania systemów OT jest określenie psychologicznych czynników i zasad, warunkujących działalność człowieka - operatora w systemach pracy, w których człowiek pełni przede wszystkim funkcje sterownicze.
Parametry określające tę działalność to charakterystyki: przepustowości informacyjnej, szybkości działania, niezawodności. Zależą one od wielu czynników, między którymi istnieje złożona więź funkcjonalna. Do określenia takich charakterystyk potrzebne są dane (informacje) o działalności operatora, które można uzyskać na wiele sposobów.
Ważniejsze z nich to ( 7-5. slajd 12):
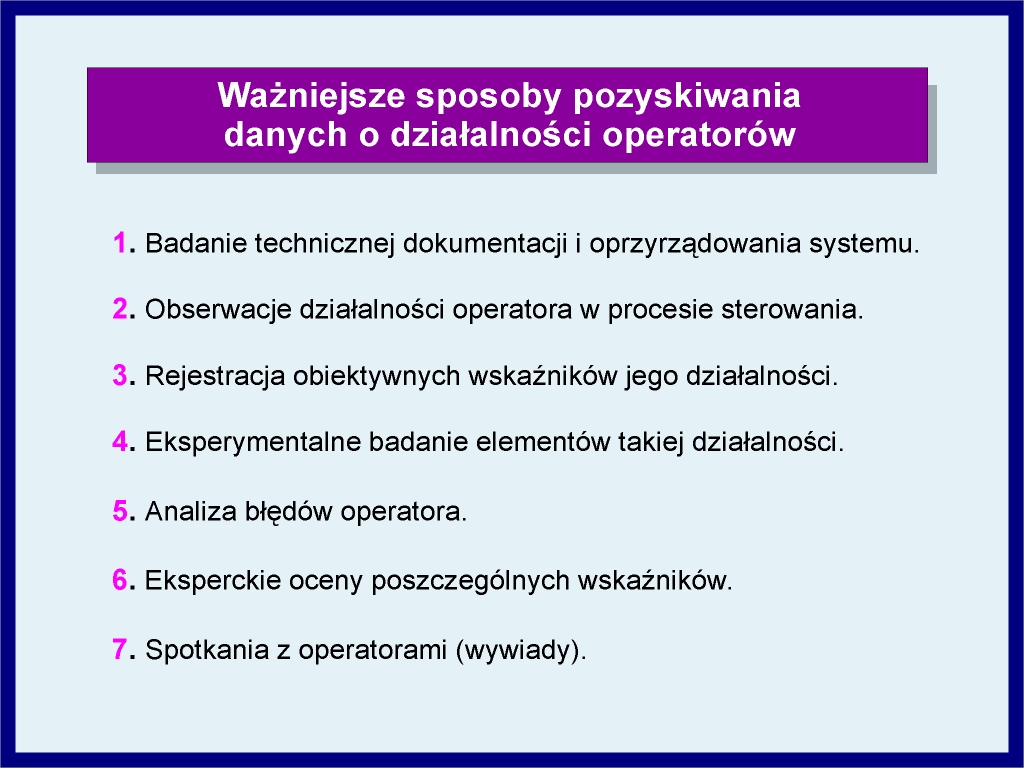
7-5. slajd 12
| 7-5.4.3. Podstawowe cele badań |
Wymienione metody badań wykorzystuje się w trzech typowych zadaniach, gdy:
| 7-5.4.4. Charakterystyka metod zbierania danych o działalności operatorów [7] |
| 7-5.5. Metody opisu i analizy działalności operatora |
Wyróżnia się dwie kategorie opisów działalności operatora:
| 7-5.5.1. Opis i analiza działalności na poziomie systemu |
Analiza dowolnej działalności przewiduje jej rozdzielenie na poszczególne składniki wg specjalnie wybranych kryteriów lub cech. W zależności od celu wykonuje się analizę o różnym stopniu detalizacji. Na przykład, podczas analizowania działalności operatora można mieć następujące cele:
Każdy sposób może być wykorzystany również do węższego celu: przystosowania działalności człowieka do maszyny, przystosowania maszyny do człowieka.
Do opisu ogólnych zależności i właściwości działalności operatora na poziomie systemu można używać różnych metod:
Podstawowe metody opisu (analizy) działalności operatorów w systemach można wstępnie scharakteryzować następująco:
| 7-5.5.2. Podstawowe metody opisu (analizy) działalności operatorów na poziomie operacji |
Na poziomie operacji można stosować następujące metody:
-
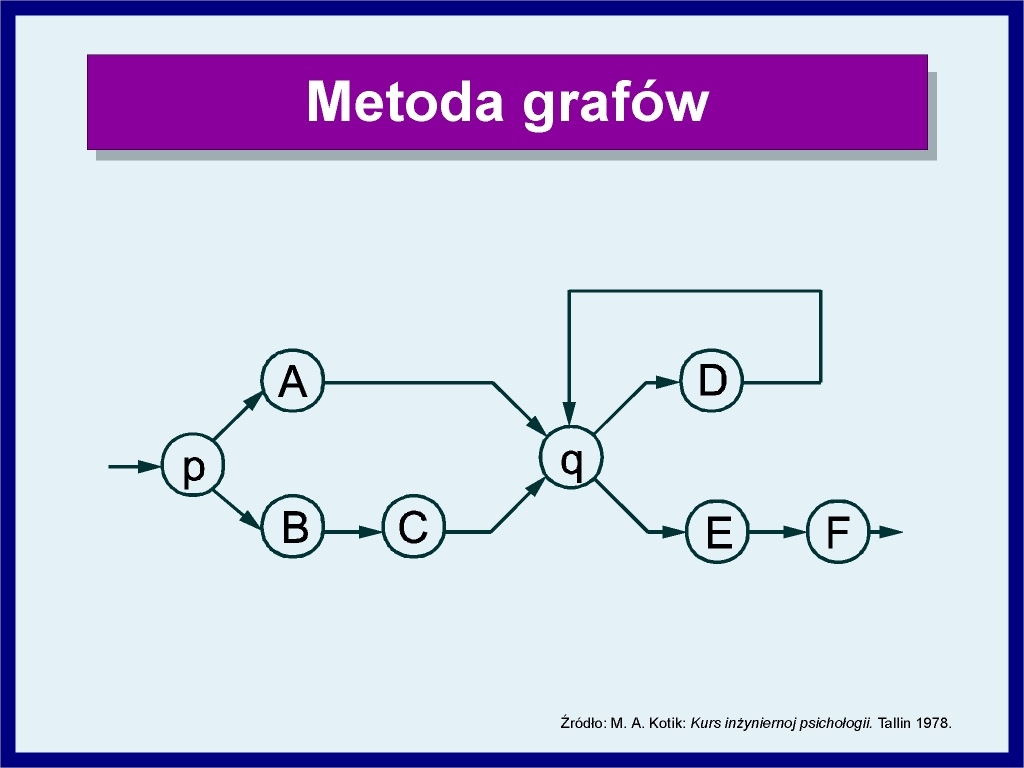
Metoda grafów
Metoda ta służy do szybkiego przedstawienia poszczególnych charakterystyk działalności człowieka w systemie sterowania.
Na przykład, graf oceny przez operatora wskazań czujnika przedstawiony na foliogramie 7-5. slajd 19 opisuje następujące czynności: operator zamierza włączyć czujnik (p), który może być włączony (A) lub wyłączony (B); jeżeli nie jest włączony, to go włącza (C), następnie sprawdza (q) zgodność wskazań z zadanym programem; jeżeli jest zgodność, to kontynuuje kontrolę pracy systemu (D), jeżeli nie ma zgodności (E), to steruje systemem (F), aby przywrócić zgodność z programem.
Można do takich schematów dołączyć skalę czasową i proces przetwarzania przedstawić w funkcji czasu.
Metoda diagramu etapów operatywnych
W tej metodzie, opracowanej przez M. Kurke [7], sposoby przetwarzania informacji i działania operatora oznacza się geometrycznymi znakami, a linie łączące znaki obrazują następstwo działań (7-5. slajd 20)
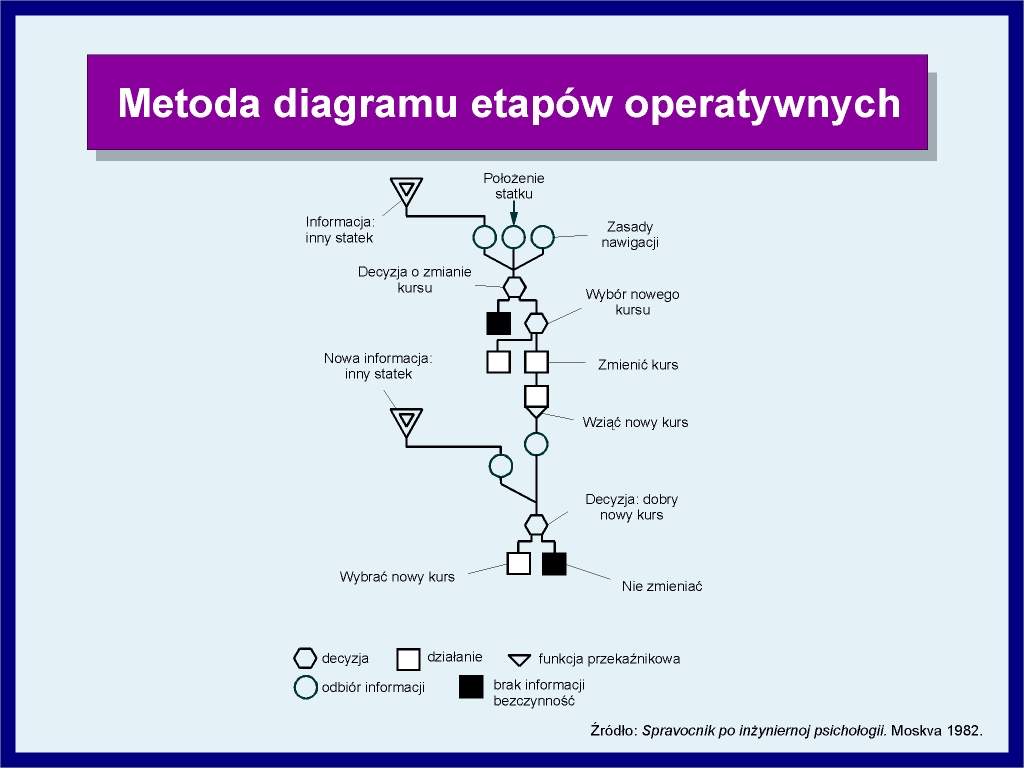
(7-5. slajd 20)
Metoda opisu algorytmicznego
Algorytm pracy systemu jest rozumiany jako zbiór elementarnych operacji przetwarzania informacji i warunków logicznych, określających kolejność występowania tych operacji, który rozwiązuje postawione zadanie.
Metoda ta daje najlepsze wyniki przy analizie istniejących systemów.
Metoda algorytmów (algorytmów organizacyjnych)
Metoda ta pozwala graficznie przedstawić wszystkie logiczne warunki, które bierze się pod uwagę podczas rozwiązywania zadań w procesie sterowania. Na przykład, takim zadaniem może być wykrycie przez operatora przyczyny tego, że temperatura oleju w silniku przekroczyła dopuszczalną wartość. Przyczyna może być wykryta na drodze przeglądu warunków logicznych. Warunki i ich porządek (kolejność) przedstawia się na algorytmach organizacyjnych (7-5. slajd 21)
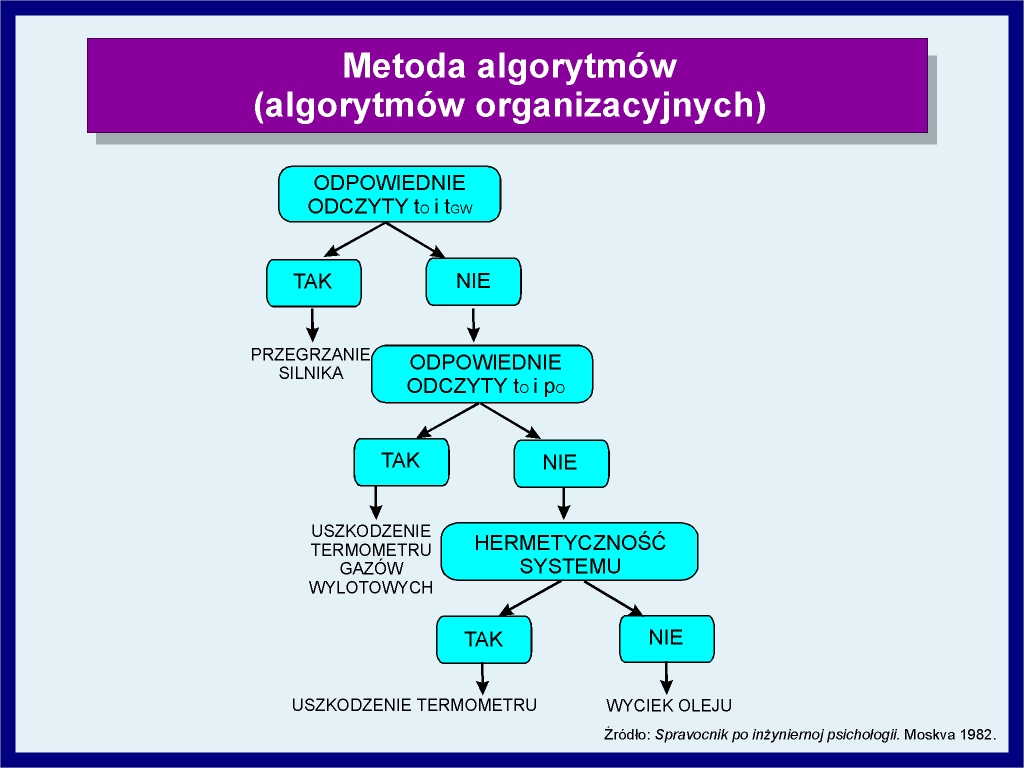
(7-5. slajd 21)
Przedstawione tu metody modelowania systemów "człowiek - obiekt techniczny - otoczenie (środowisko pracy)" należy traktować jako uproszczone przykłady. Przecież prawie we wszystkich modułach niniejszego pakietu edukacyjnego są wykorzystane różne modele omawianego systemu.
| 7-5.6. Literatura |
Bezpieczeństwo pracy i ergonomia. Red. nauk. D. Koradecka. T.1-2. Warszawa, CIOP 1999.
Górska E., Tytyk E.: Ergonomia w projektowaniu stanowisk pracy. Podstawy teoretyczne. Warszawa, OWPW 1998.
Hempel L.: Człowiek i maszyna. Model techniczny współdziałania. Warszawa, WKiŁ 1984.
Kotik M.A.: Kurs inżyniernoj psichołogii. Tallin, Bałgus 1978.
Krick E.V.: Wprowadzenie do techniki i projektowania technicznego. Warszawa, WNT 1975.
Słowikowski J.: Ergonomia w projektowaniu i rozwoju maszyn roboczych. Problemy Maszyn Roboczych 1996, vol.8, z.8, Radom ITE.
Spravocnik po inżyniernoj psichołogii. Red. nauk. B.F. Łomov. Moskva, Masinostrojenije 1982
SŁOWIKOWSKI J.: Ergonomia w pracach badawczo-rozwojowych w budowie maszyn. Materiały VII Konferencji: Okrętownictwo i Oceanotechnika, - Transport zintegrowany, Wyd. Politechniki Szczecińskiej, Szczecin, 2004, s.223÷230
SŁOWIKOWSKI J.: Optymalizacja ergonomiczna elementów i układów sterujących z użyciem symulatora ED3. Prace PIMB, Warszawa 2001, s.51-60.